





























10-2
10-1 Analog Monitor
OMNUC G5-Series AC Servo Drives Users Manual (Built-in MECHATROLINK-II communications type)
10
Adj
u
st
me
nt
Func
tions
13
Reverse direction torque limit
%
33
14
Speed limit value
r/min
500
15
Inertia ratio
%
500
16 to 18 Reserved
19
Encoder temperature
*3
C
10
20
Servo Drive temperature
C
10
21
Encoder 1-rotation data
*4
pulse (encoder unit)
110000
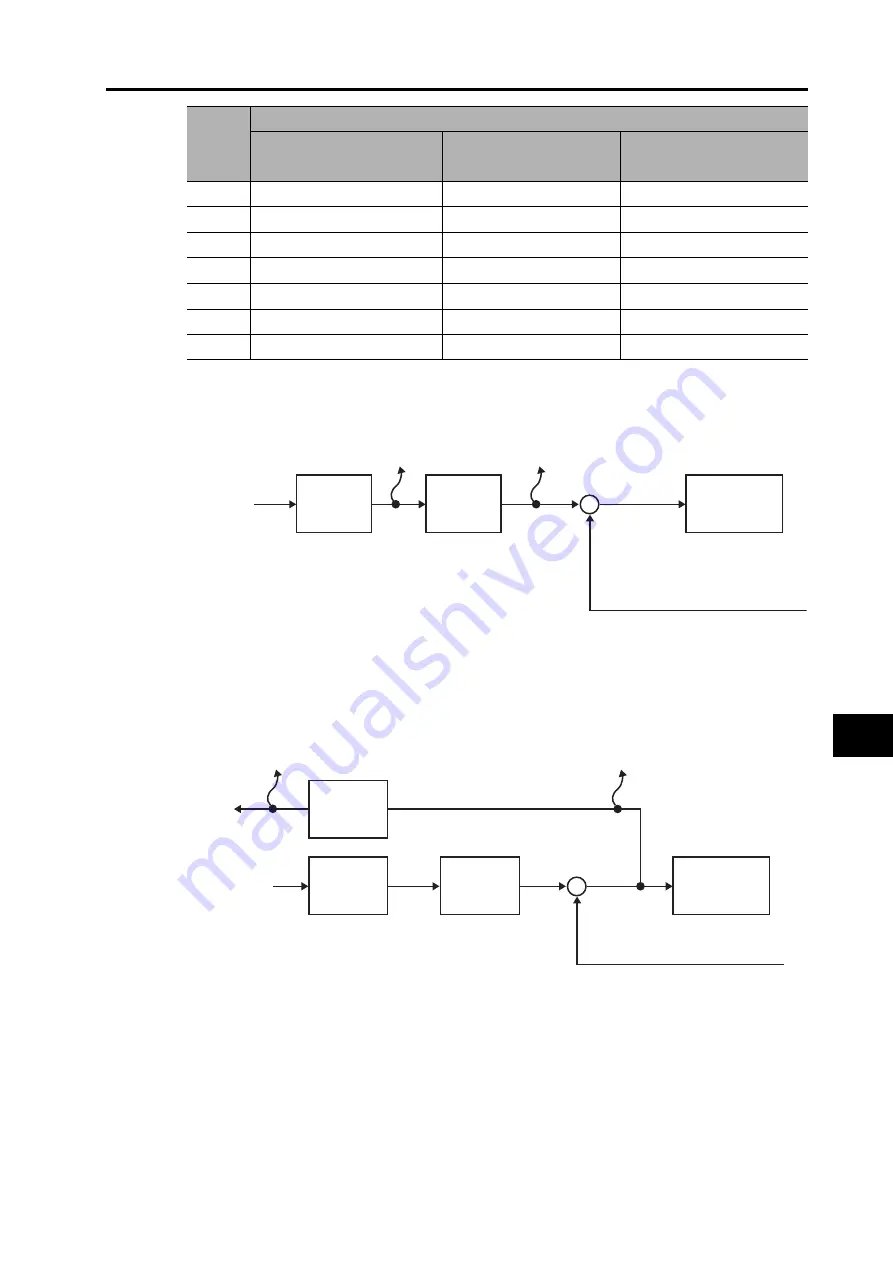
*1.The Position command speed is the speed before the command input passes through the command
filter (the position command filter time constant and the smoothing filter time constant). The internal
command speed is the speed after the command input passes through the command filter.
*2.The position command error is an error on the command input. The encoder position error and the full
closing position error are the error of the input section of the position control.
Each of position error and feedback pulse error is expressed in 2 types of units: Encoder unit and
command unit for position errors, and external encoder unit and command unit for feed back pulse
errors. The encoder unit and the external encoder unit are for the errors of the position control input
sections, while the command unit is for the error of command pulse inputs.
*3.The encoder temperature is indicated only for the 20-bit incremental encoder. The value is not settled
for other types of encoders.
*4.Directions of monitor data, either forward or reverse, is the direction set in the Rotation Direction
Switching (Pn000). However, CCW is the forward direction for the absolute encoder 1-rotation data. A
normal value is output from the incremental encoder after the first phase Z.
Pn416
and
Pn418
set value
Description
Monitoring item
Unit
Output gain when Pn417
and Pn419 are set to 0
Command
input
Electronic
gear
Position command
speed [r/min]
Internal command
speed [r/min]
+
−
Position
command
filter
Position
Control
Encoder feedback/external
encoder
Command
input
Electronic
gear
Encoder position error (encoder unit) or
Full closing error (external encoder unit)
+
−
Position
command
filter
Position
control
Encoder feedback/external
encoder feedback
Position command error (command unit) or
Command feedback pulse error (command unit)
Electronic gear
reverse
conversion





















































