





























8-36
8-5 Interface Monitor Setting Parameters
OMNUC G5-Series AC Servo Drives Users Manual (Built-in MECHATROLINK-II communications type)
8
Parameters Details
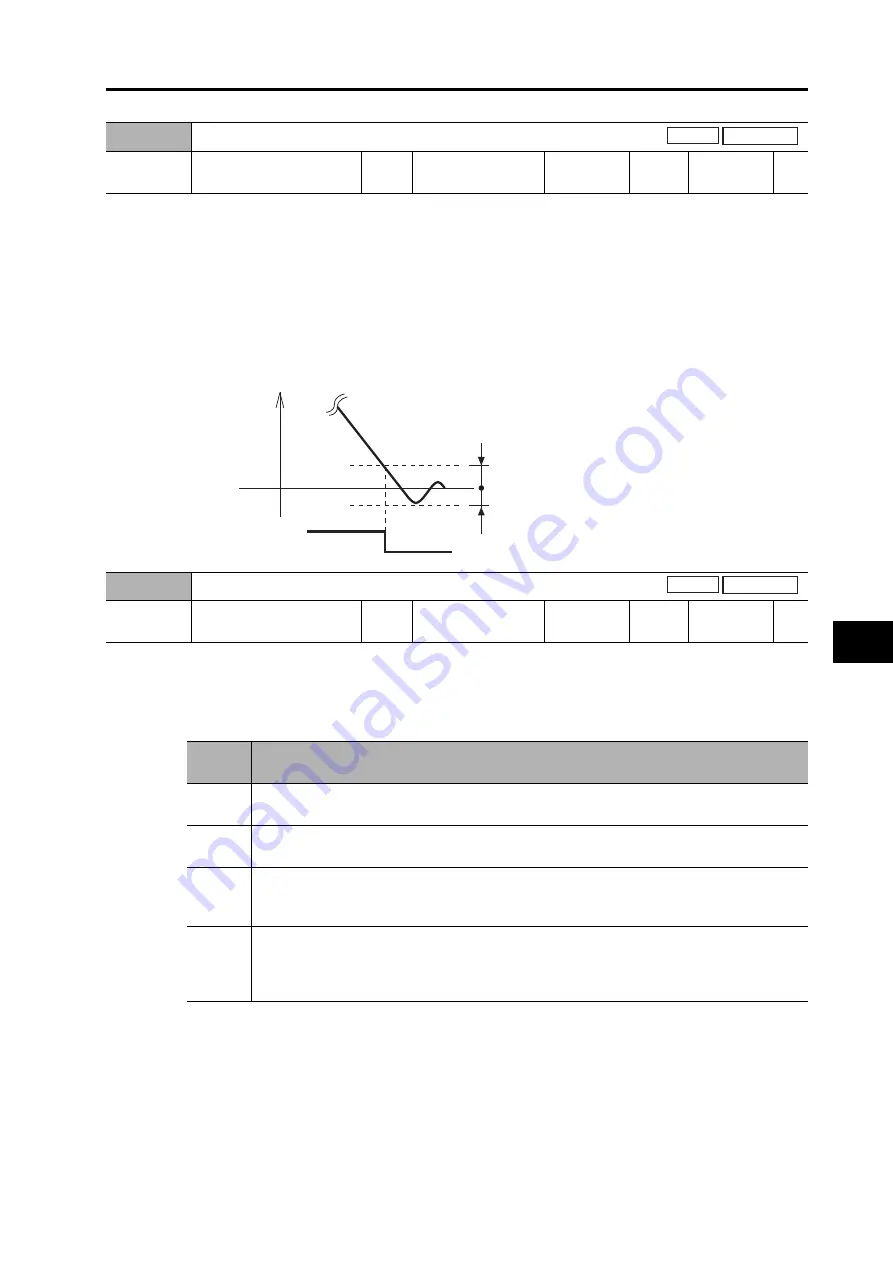
Use this parameter in combination with the Positioning Completion Condition Selection (Pn432) to set
the timing to output the positioning completion output (INP1).
The positioning completion output (INP1) turns ON when the absolute value of position error
counter during position control goes below the positioning completion range set by this parameter.
Unit for setting is command unit, but it can be changed to encoder unit with Position Setting Unit
Selection (Pn520). However, note that unit for error counter overflow level changes as well.
If an extremely small value is set to this parameter, it may take time to output the INP signal, or
chattering may occur at outputs.
The setting on the Positioning Completion Range does not give any influence to the final
positioning accuracy.
Use this in combination with the Positioning Completion Range 1 (Pn431) to set the operation for
positioning completion output (INP1).
Explanation of Set Values
Pn431
Positioning Completion Range 1
Setting
range
0 to 262144
Unit
Command unit
Default
setting
300
Data
attribute
A
Position
Full closing
INP
Accumulated
pulse
ON
Pn431
Pn431
Pn432
Positioning Completion Condition Selection
Setting
range
0 to 3
Unit
Default
setting
0
Data
attribute
A
Position
Full closing
Set
value
Description
0
Positioning completion output (INP1) turns ON when the position error is within the
Positioning Completion Range 1 (Pn431).
1
Positioning completion output (INP1) turns ON when the position error is within the
Positioning Completion Range 1 (Pn431) and there is no position command.
2
Positioning completion output (INP1) turns ON when the zero speed detection output (ZSP)
is ON, the position error is within the Positioning Completion Range 1 (Pn431), and there is
no position command.
3
Positioning completion output turns ON when the position error is within the Positioning
Completion Range 1 (Pn431) and there is no position command. The ON status is then held
until the Positioning Completion Hold Time (Pn433) elapses. After that, it turns ON or OFF
based on the position error at the time.





















































