





























Page 96
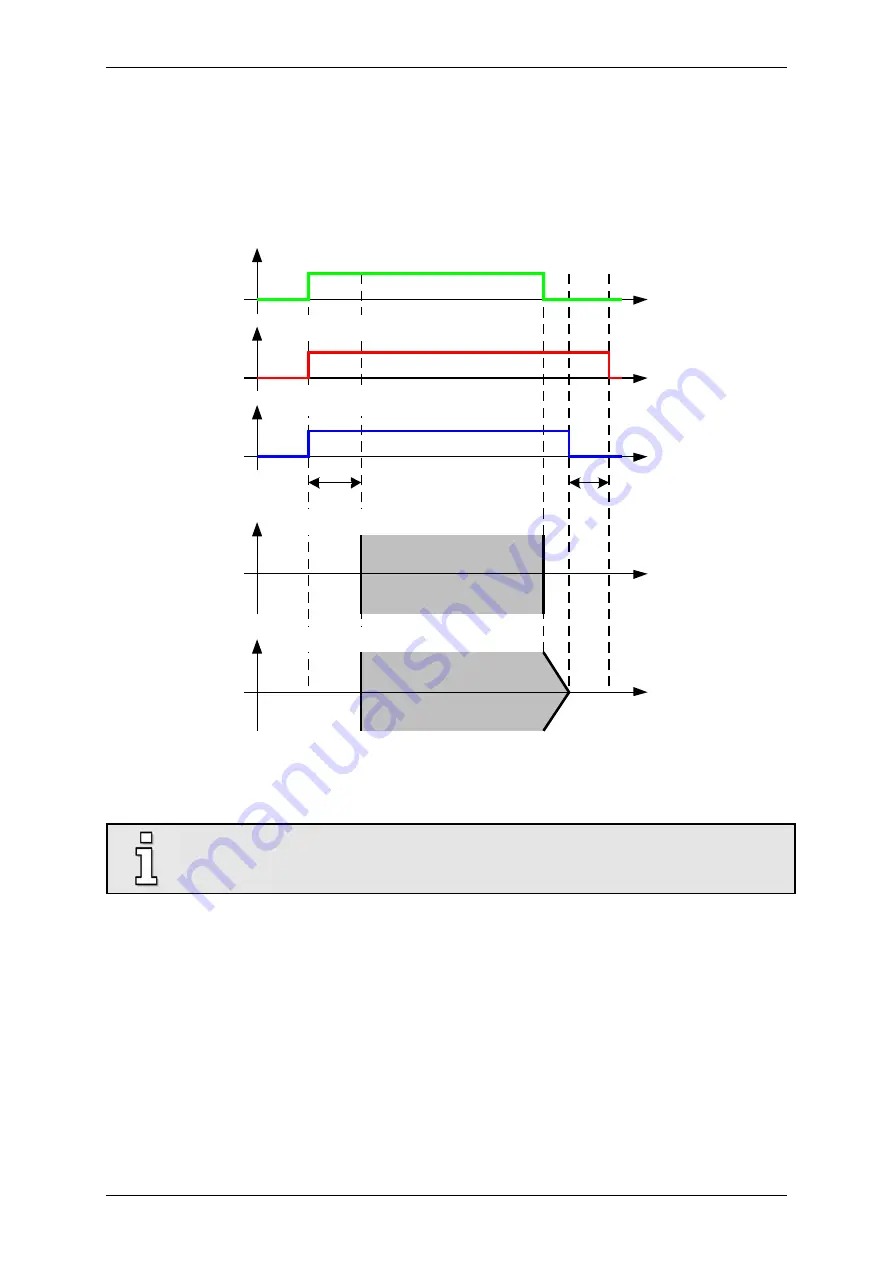
When the controller is disabled, the speed setpoint will be set to zero. When the actual speed is about
zero, the holding brake is activated. The
stop delay
takes effect as of this point of time. During this
time, the drive will be kept in its current position until the holding brake has developed its full holding
torque. When the delay period is over, the controller is disabled. In both cases, the mechanical wear of
the holding brake is reduced.
t
F
t
A
controller enable
speed setpoint
speed actual value
t
F
run delay
t
A
: stop delay
output state active
holding brake unlock
Figure 26: Holding brake time response
After the controller has been enabled, speed setpoints or positioning start commands do
not become effective until at the end of the run delay.
In torque control mode, the torque setpoints become active or inactive when the controller is enabled
internally.
Analog inputs AIN0 and AIN1
The servo positioning controller has two analog inputs for the input voltage range of
±
10 V. They have
a resolution of 12 bits. These inputs can be used flexibly to assign speed and torque setpoints.
If you select
Parameters/IOs/Analog inputs
or click the "…" button in the setpoint selector menu
when the analog input is activated, the following menu will be displayed:
User Manual DUET_FL „DUET_FL 48/10“
Version 1.1 Motor Power Company
Summary of Contents for DUET_FL 48/10
Page 3: ...ber dieses Handbuch Page 3...
Page 4: ...Page 4 User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...
Page 12: ...Page 12 List of Figures User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...
Page 15: ...Page 15 List of Tables User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...
Page 76: ...Page 76 User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...
Page 196: ...Page 196 User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...







































































