





























Installation 2. Installation
RC700-D Rev.2
5
2.2 Unpacking
Unpacking of the Manipulators and robotic equipment shall be performed by personnel
who has taken robot system training held by us and suppliers and should conform to all
national and local codes.
Please read “Safety Manual” and check safety considerations before installing the robot
system or before connecting cables.
2.3 Transportation
2.3.1 Transportation Precautions
Transporting of the Manipulators and robotic equipment shall be performed by personnel
who has taken robot system training held by us and suppliers and should conform to all
national and local codes.
Please read “Safety Manual” and check safety considerations before installing the robot
system or before connecting cables.
During unpacking and relocation, avoid applying external force to the arms and motors of
the Manipulator.
When transporting the Manipulator for a long distance, secure it to the delivery equipment
so that the Manipulator cannot fall. If necessary, pack the Manipulator in the same way as
it was delivered.
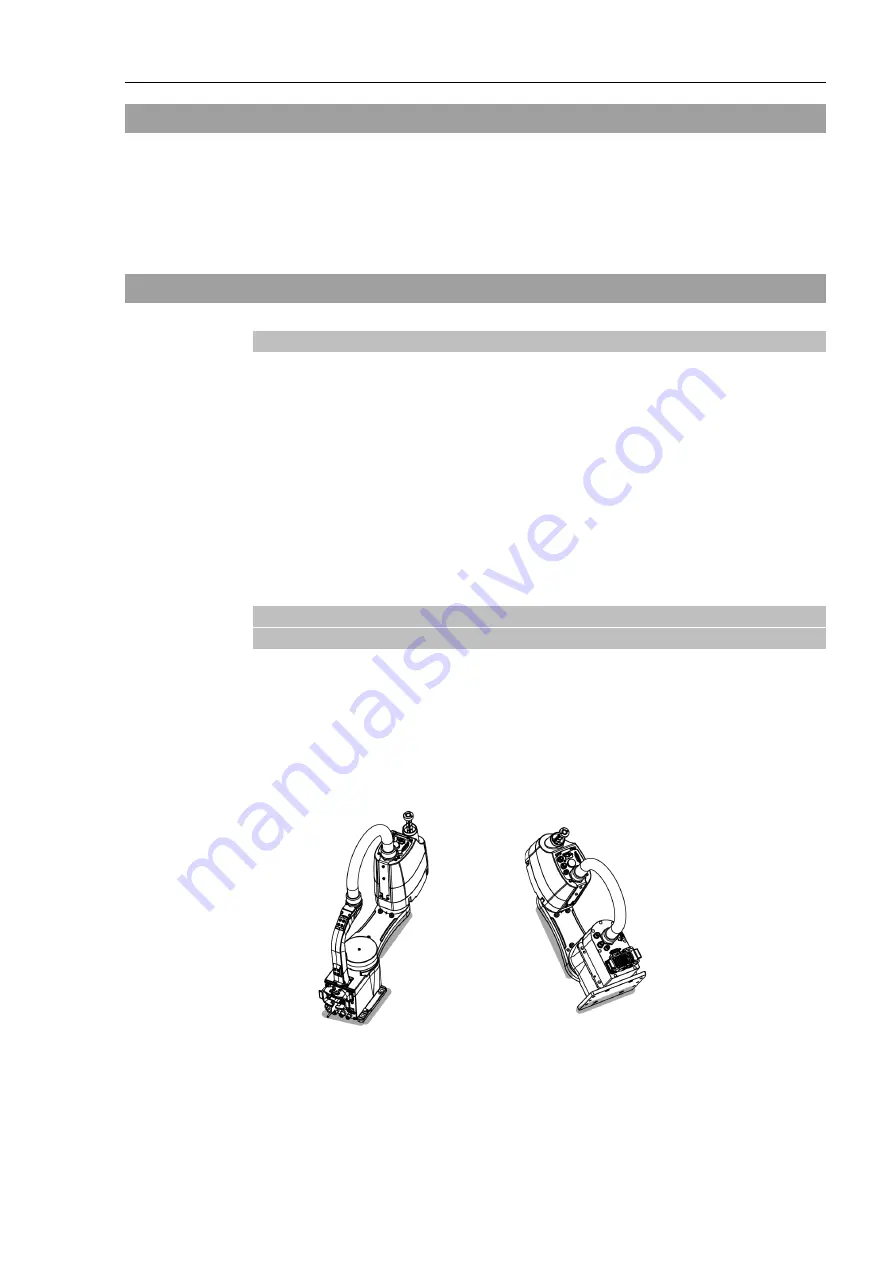
2.3.2 Number of people and position to hold, when transporting
manipulator
GX4
Where to hold
: Under the arm 1 and bottom of the base *(shade part)
* When hold bottom of the base, be careful not caught your
hands or fingers.
Minimum number of people : 2 people
Do not hold
: -
Table Top Mounting
Multiple Mounting
Summary of Contents for RC700-D
Page 1: ...Control Unit RC700 D Original instructions Rev 2 EM221C5146F ROBOT CONTROLLER RC700 D Manual ...
Page 2: ...ROBOT CONTROLLER RC700 D Manual Rev 2 ...
Page 8: ...vi RC700 D Rev 2 ...
Page 16: ...Table of Contents xiv RC700 D Rev 2 ...
Page 18: ......
Page 80: ...Installation 5 Second Step 64 RC700 D Rev 2 ...
Page 82: ......
Page 87: ...Functions 1 Specifications RC700 D Rev 2 71 1 3 Outer Dimensions Unit mm ...
Page 190: ......
Page 202: ...Regular Inspection 3 Alarm 186 RC700 D Rev 2 ...
Page 203: ...187 Appendix ...
Page 204: ......







































































