





























Functions 12. I/O Remote Settings
RC700-D Rev.2
131
Name
Initial
Description
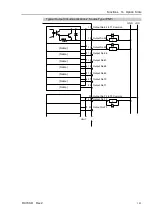
ALIVE
Not set
Output signal for alive monitoring of the Controller.
The signal input by ALIVE input will be output. The
master equipment can perform alive monitoring of the
Controller by switching the input periodically and
checking the output signal.
ForceControlOn
Not set
Turns ON when the manipulator operating force
control function.
(*5)
ExtCmdGet
Not set
For extended remote I/O command.
For details, refer to the following manual.
Remote Control Reference
4. Remote I/O to Be Used
ExtRespSet
Not set
ExtCmdResult
Not set
ExtError
Not set
ExtResp_0-15
Not set
ExtResp_16-31
Not set
ExtResp_32-47
Not set
ExtResp_48-63
Not set
ExtResp_64-79
Not set
ExtResp_80-95
Not set
ExtResp_96-111
Not set
ExtResp_112-127
Not set
(*1) Outputs the current or the last function number of CurrProg1, 2, 4, 8, 16, or 32.
Function
CurrProg1 CurrProg2 CurrProg4 CurrProg8
CurrProg16
CurrProg32
Main
0
0
0
0
0
0
Main1
1
0
0
0
0
0
Main2
0
1
0
0
0
0
Main3
1
1
0
0
0
0
.
.
.
Main60
0
0
1
1
1
1
Main61
1
0
1
1
1
1
Main62
0
1
1
1
1
1
Main63
1
1
1
1
1
1
0=OFF, 1=ON
(*2) Remote function is available in the followings conditions.
- The setting is Auto mode and the control device is remote.
- The setting is Program mode and Remote I/O is enabled.
(*3) For details, refer to EPSON RC+ 7.0
Online Help
or
Box
in
SPEL
+
Language Reference
.
(*4) For details, refer to EPSON RC+ 7.0
Online Help
or
Plane
in
SPEL
+
Language Reference
.
(*5) Manipulator status is output as follows, according to the condition selected in SelRobot.
Wait at least 40 ms before inputting the signal after changing the condition in SelRobot.
Name
(SelRobot1- SelRobot16) condition when inputting SelRobot
0: All robots are selected
1 - 16: Particular robot number is
selected
MotorsOn
Turns ON when at least one motor is
ON.
Turns ON when the motor of the selected
robot is ON.
AtHome
Turns ON when all robots are in the
home position.
Turns ON when the selected robot is in the
home position.
PowerHigh
Turns ON when at least one robot’s
power mode is High.
Turns ON when the selected robot’s power
mode is High.
MCalReqd
Turns ON when at least one robot
hasn’t executed MCal
Turns ON when the selected robot hasn’t
executed MCal.
(*6) Outputs information of the selected robot when SelRobot1, SelRobot2, SelRobot4, SelRobot8, and
SelRobot16 are set. If not, information of Robot 1 will be output.
Summary of Contents for RC700-D
Page 1: ...Control Unit RC700 D Original instructions Rev 2 EM221C5146F ROBOT CONTROLLER RC700 D Manual ...
Page 2: ...ROBOT CONTROLLER RC700 D Manual Rev 2 ...
Page 8: ...vi RC700 D Rev 2 ...
Page 16: ...Table of Contents xiv RC700 D Rev 2 ...
Page 18: ......
Page 80: ...Installation 5 Second Step 64 RC700 D Rev 2 ...
Page 82: ......
Page 87: ...Functions 1 Specifications RC700 D Rev 2 71 1 3 Outer Dimensions Unit mm ...
Page 190: ......
Page 202: ...Regular Inspection 3 Alarm 186 RC700 D Rev 2 ...
Page 203: ...187 Appendix ...
Page 204: ......







































































