





























202
Signal and parameter list
3ADW000379R0501 DCS550 Manual e e
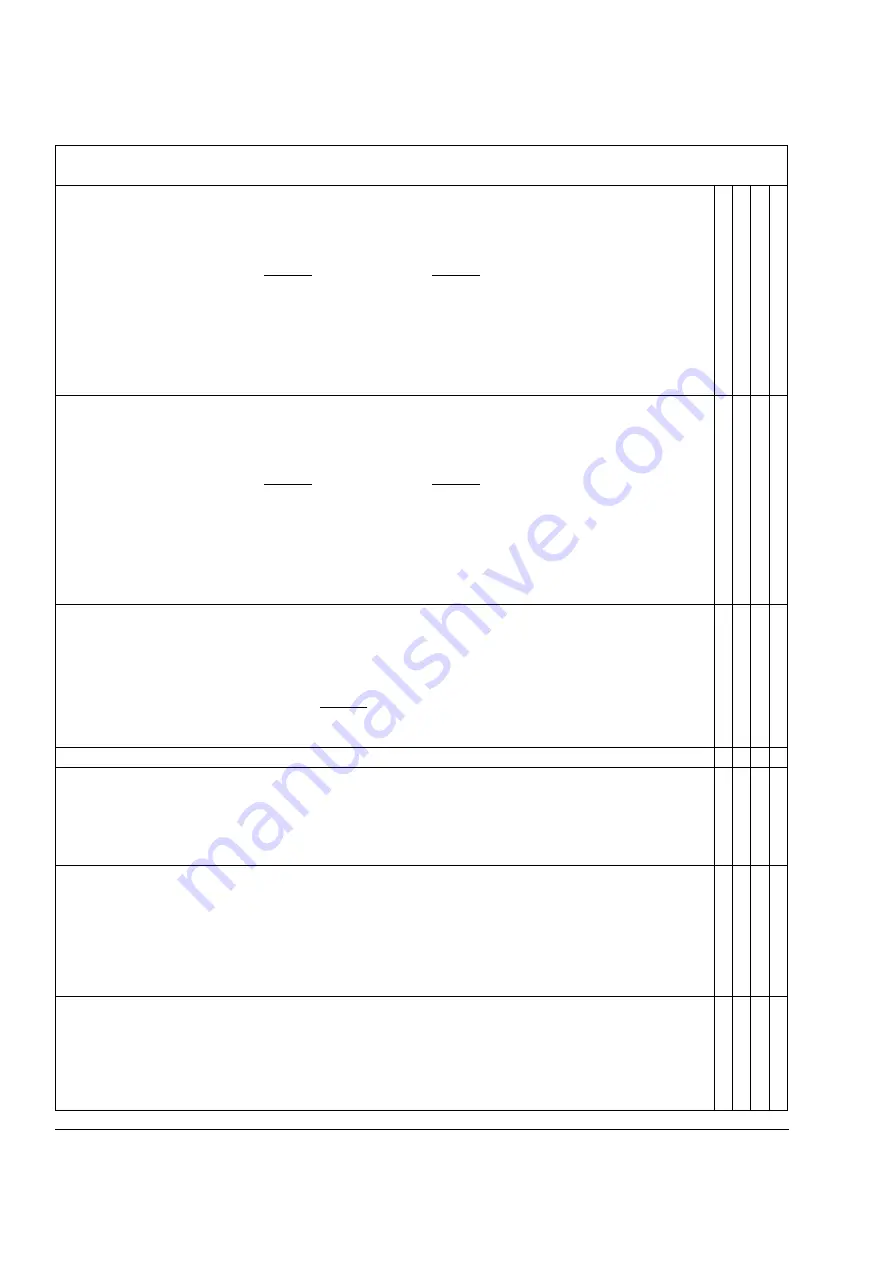
Signal / Parameter name
m
in.
ma
x.
def
.
uni
t
20.01 M1SpeedMin (minimum speed)
Negative speed reference limit in rpm for:
−
SpeedRef2 (2.01)
−
SpeedRefUsed (2.17)
Internally limited from:
rpm
to
rpm
20000
32767
*
)
29
.
2
(
20000
32767
*
)
29
.
2
(
−
Notes:
−
M1SpeedMin (20.01) is must be set in the range of 0.625 to 5 times of M1BaseSpeed (99.04). If the
scaling is out of range A124 SpeedScale [AlarmWord2 (9.07) bit 7] is generated.
−
M1SpeedMin (20.01) is also applied to SpeedRef4 (2.18) to avoid exceeding the speed limits by means of
SpeedCorr (23.04).
Int. Scaling: (2.29)
Type: SI
Volatile:
N
-10000
10000
-1500
rp
m
20.02 M1SpeedMax (maximum speed)
Positive speed reference limit in rpm for:
−
SpeedRef2 (2.01)
−
SpeedRefUsed (2.17)
Internally limited from:
rpm
to
rpm
20000
32767
*
)
29
.
2
(
20000
32767
*
)
29
.
2
(
−
Notes:
−
M1SpeedMax (20.02) is must be set in the range of 0.625 to 5 times of M1BaseSpeed (99.04). If the
scaling is out of range A124 SpeedScale [AlarmWord2 (9.07) bit 7] is generated.
−
M1SpeedMax (20.02) is also applied to SpeedRef4 (2.18) to avoid exceeding the speed limits by means of
SpeedCorr (23.04).
Int. Scaling: (2.29)
Type: SI
Volatile:
N
-10000
10000
1500
rp
m
20.03 M1ZeroSpeedLim (zero speed limit)
When the Run command is removed [set UsedMCW (7.04) bit 3 to zero], the drive will stop as chosen by
StopMode (21.03). As soon as the actual speed reaches the limit set by M1ZeroSpeedLim (20.03) the motor
will coast independent of the setting of StopMode (21.03). Existing brakes are closed (applied). While the
actual speed is in the limit, ZeroSpeed [AuxStatWord (8.02) bit 11] is high.
Internally limited from:
rpm
to
rpm
20000
32767
*
)
29
.
2
(
0
Int. Scaling: (2.29)
Type: I
Volatile:
N
0
1000
75
rp
m
20.04 Unused
20.05 TorqMax (maximum torque)
Maximum torque limit - in percent of MotNomTorque (4.23) - for selector TorqUsedMaxSel (20.18).
Note:
The used torque limit depends also on the converter's actual limitation situation (e.g. other torque limits,
current limits, field weakening). The limit with the smallest value is valid.
Int. Scaling: 100 == 1 % Type: SI
Volatile:
N
0
325
100
%
20.06 TorqMin (minimum torque)
Minimum torque limit - in percent of MotNomTorque (4.23) - for selector TorqUsedMinSel (20.19).
Notes:
−
The used torque limit depends also on the converter's actual limitation situation (e.g. other torque limits,
current limits, field weakening). The limit with the largest value is valid.
−
Do not change the default setting of TorqMin (20.06) for 2-Q drives, because M1CurLimBrdg2 (20.13) is
internally set to 0 % if QuadrantType (4.15) = BlockBridge2 (2-Q drive).
Int. Scaling: 100 == 1 % Type: SI
Volatile:
N
-3
25
0
-100
%
20.07 TorqMaxSPC (maximum torque speed controller)
Maximum torque limit - in percent of MotNomTorque (4.23) - at the output of the speed controller:
−
TorqRef2 (2.09)
Note:
The used torque limit depends also on the converter's actual limitation situation (e.g. other torque limits,
current limits, field weakening). The limit with the smallest value is valid.
Int. Scaling: 100 == 1 % Type: SI
Volatile:
N
0
325
325
%
Summary of Contents for DCS550 Series
Page 1: ... DCS550 Manual DCS550 Drives 20 A to 1000 A ...
Page 141: ...141 Winder 3ADW000379R0501 DCS550 Manual e e ...
Page 143: ...143 Winder 3ADW000379R0501 DCS550 Manual e e ...
Page 145: ...145 Winder 3ADW000379R0501 DCS550 Manual e e ...
Page 147: ...147 Winder 3ADW000379R0501 DCS550 Manual e e ...







































































