





























262
Signal and parameter list
3ADW000379R0501 DCS550 Manual e e
Signal / Parameter name
m
in.
ma
x.
def
.
uni
t
97.13 DevLimPLL (phase locked loop deviation limit)
Maximum allowed deviation of the PLL controller. The current controller is blocked in case the limit is reached
- see CurCtrlStat2 (6.04) bit 13:
for 50 Hz mains is valid:
000
.
20
50
1
20
360
==
=
==
°
Hz
ms
for 60 Hz mains is valid:
667
.
16
60
1
67
.
16
360
==
=
==
°
Hz
ms
The PLL input can be seen in PLLIn (3.20). The PLL output can be seen in MainsFreqAct (1.38).
Int. Scaling: 100 == 1 °
Type: I
Volatile:
N
5
20
10
°
97.14 KpPLL (phase locked loop p-part)
Gain of firing unit’s phase lock loop.
Int. Scaling: 100 == 1
Type: I
Volatile:
N
0.
25
5
2
-
97.15 TfPLL (phase locked loop filter)
Filter of firing unit’s phase lock loop.
Int. Scaling: 1 == 1 ms
Type: I
Volatile:
N
0
1000
0
ms
97.16 Unused
97.17 OffsetIDC (offset DC current measurement)
Offset value - in percent of M1NomCur (99.03) - added to the armature current measurement. OffsetIDC
(97.17) adjusts ConvCurAct (1.16) and the real armature current.
Setting OffsetIDC (97.17) to 0 disables the manual offset.
Commissioning hint:
In case a 2-Q converter module is used and the motor turns with speed reference equals zero increase
OffsetIDC (97.17) until the motor is not turning anymore.
Int. Scaling: 100 == 1 % Type: I
Volatile:
N
-5
5
0
%
97.18 Unused
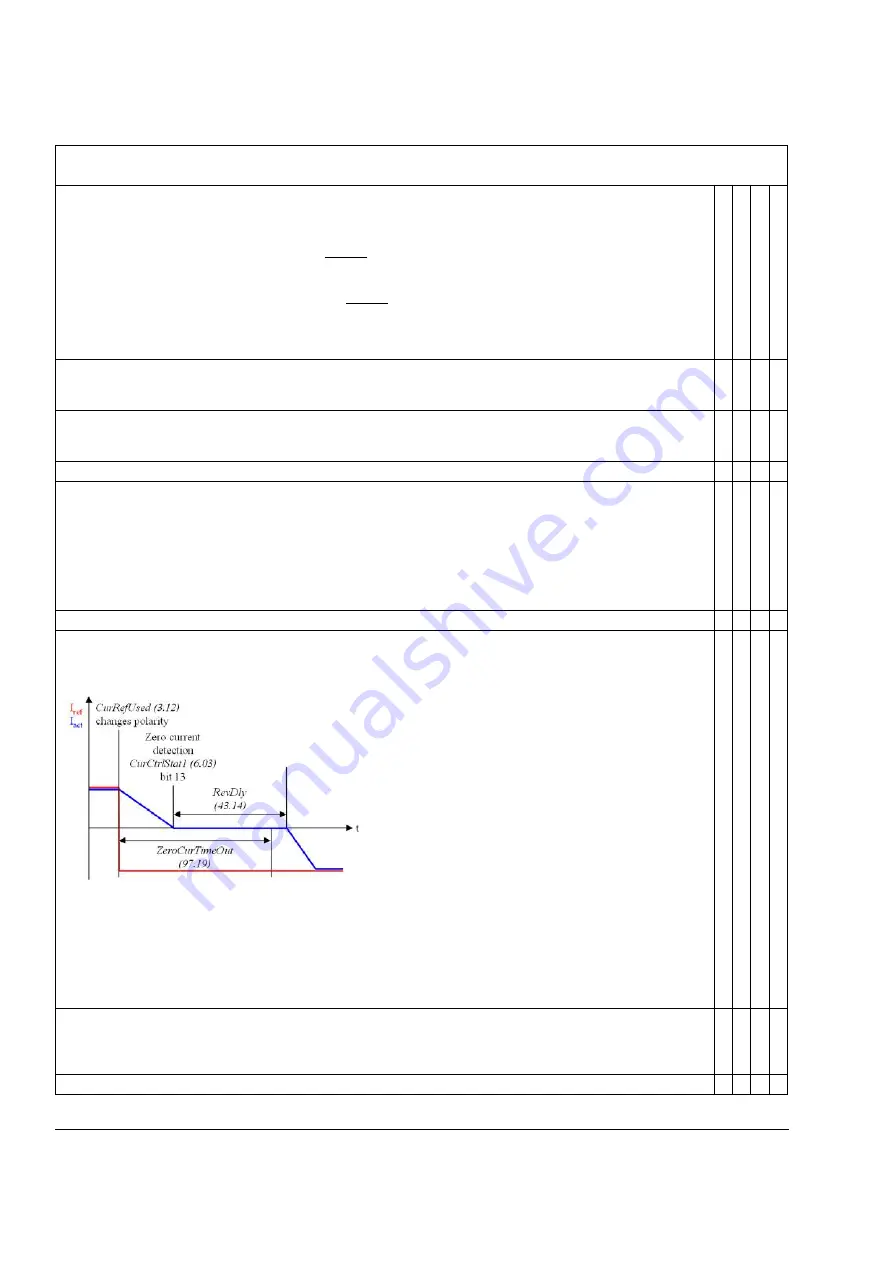
97.19 ZeroCurTimeOut (zero current timeout)
After a command to change current direction - see CurRefUsed (3.12) - the opposite current has to be
reached before ZeroCurTimeOut (97.19) has been elapsed otherwise the drive trips with F557 ReversalTime
[FaultWord4 (9.04) bit 8].
The reversal delay time starts when zero current has been detected - see CurCtrlStat1 (6.03) bit 13 - after a
command to change current direction - see CurRefUsed (3.12) - has been given. The time needed to change
the current direction can be longer when changing from motoring mode to regenerative mode at high motor
voltages, because the motor voltage must be reduced before switching to regenerative mode - see also
RevVoltMargin (44.21).
Note:
ZeroCurTimeOut (97.19) must be longer than RevDly (43.14).
Int. Scaling: 1 == 1 ms
Type: I
Volatile:
N
0
12000
20
ms
97.20 TorqActFiltTime (actual torque filter time)
Torque actual filter time constant for MotTorqFilt (1.07). Is used for the EMF controller and the EMF feed
forward.
Int. Scaling: 1 == 1 ms
Type: I
Volatile:
N
0
10000
1000
ms
97.21 - 97.24 Unused
Summary of Contents for DCS550 Series
Page 1: ... DCS550 Manual DCS550 Drives 20 A to 1000 A ...
Page 141: ...141 Winder 3ADW000379R0501 DCS550 Manual e e ...
Page 143: ...143 Winder 3ADW000379R0501 DCS550 Manual e e ...
Page 145: ...145 Winder 3ADW000379R0501 DCS550 Manual e e ...
Page 147: ...147 Winder 3ADW000379R0501 DCS550 Manual e e ...







































































