

























06.03
10.5 Axes and spindles
10-333
Siemens AG, 2003. All rights reserved
SINUMERIK 840Di Manual (HBI) – 06.03 Edition
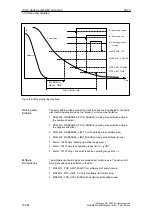
The servo gain factor is defined as the ratio of velocity in m/min and the
resulting following error in mm
Following error
Velocity
K
V
=
[m/min]
[mm]
i.e. with a Kv factor of 1 and a velocity of 1 m/min, the following error will be
1 mm.
MD32200: POSCTRL_GAIN[n] (loop gain)
is used to specify the Kv factor of the machine axis.
Note
To adapt the input/output unit of the Kv factor selected by default to the internal
unit [1/sec], the following machine data are assigned by default:
MD 10230: SCALING_FACTORS_USER_DEF[9] = 16.666667
MD 10220: SCALING_USER_DEF_MASK = ’H200’; (bit no. 9 as a hex-
adecimal value)
When entering the servo gain factor, take into account that the amplification
factor of the entire position control loop is also dependent on other parameters
of the controlled system.
These factors are:
MD32260: RATED_VELO
MD32250: RATED_OUTVAL
Tacho adjustment on the speed controller
Tacho generator on drive.
Notice
Machine axis that interpolate one with another must have the same following
error at the same velocities.
This can be achieved by setting the same K
V
factor or dynamic response
adaptation in:
MD32900: DYN_MATCH_ENABLE
MD32910: DYN_MATCH_TIME.
The real servo gain factor can be checked with the following error in the service
display.
e.g. HMI Advanced: Operating area “DIAGNOSIS” > Service displays >
Service axis.
Definition of the
K
V
factor
10 NC Start-Up with HMI Advanced
Содержание SINUMERIK 840Di
Страница 1: ...Manual 06 2003 Edition SINUMERIK 840Di ...
Страница 2: ......
Страница 522: ...06 03 A 522 Siemens AG 2003 All rights reserved SINUMERIK 840Di Manual HBI 06 03 Edition A Abbreviations Notes ...
Страница 548: ...06 03 Index 548 Siemens AG 2003 All rights reserved SINUMERIK 840Di Manual HBI 06 03 Edition Index ...
Страница 550: ......







































































