


























06.03
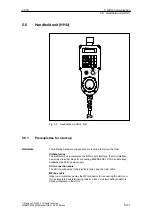
5.7 Handheld terminal HT 6
5-165
Siemens AG, 2003. All rights reserved
SINUMERIK 840Di Manual (HBI) – 06.03 Edition
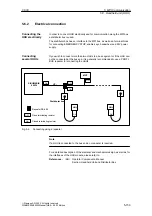
The HT 6 is parameterized as a machine control panel (MCP) in organization
block OB 100 in the call parameters of function block FB 1.
The HT 6 can be operated either as an MCP substitute or, in addition to an
MCP, as a 2nd operator component.
In order to synchronize several operator components, the PLC program must be
adapted accordingly. This is the user’s (machine manufacturer’s) responsibility.
MCPNum:
INT:= 1;
// 1: 1 operator component MCP/HT 6 (default)
// 2: Two operator components MCP/HT 6
MCP1In:
POINTER;
// address of the MCP/HT 6 1 input signals
MCP1Out:
POINTER; //
address
of the MCP/HT 6 1 output signals
MCP1StatSend:
POINTER;
// Addr. of the send status data MCP/HT 6 1
MCP1StatRec:
POINTER; //
Addr.
of the MCP1 receive status data MCP/
// HT 6 1
MCP1BusAdr:
INT:= 14;
// default MPI address of the HT 6
MCP1Timeout:
S5TIME:= S5T#700MS; // should be kept
MCP1Cycl:
S5TIME:= S5T#200MS; // should be kept
MCPMPI:
BOOL:= FALSE;
// MCP/HT 6 is operated at the “extended”
// MPI bus
The MCP2... parameters are only needed if in addition to the 1st MCP/HT 6 a
HT 6 is additionally used:
MCP2In:
POINTER; //
address
of the MCP/HT 6 2 input signals
MCP2Out:
POINTER; //
address
of the MCP/HT 6 2 output signals
MCP2StatSend:
POINTER; //
Addr.
of the send status data MCP/HT 6 2
MCP2StatRec:
POINTER; //
Addr.
of the MCP1 receive status data MCP/
// HT 6 2
MCP2BusAdr:
INT;
// MPI address
MCP2Timeout:
S5TIME:= S5T#700MS; // should be kept
MCP2Cycl:
S5TIME:= S5T#200MS; // should be kept
The parameters listed below serve to synchronize two operator components:
MCP1Stop:
BOOL:= FALSE;
// 0: Start transfer of the MCP/HT 6 signals
MCP2Stop:
BOOL:= FALSE;
// 1: Start transfer of the MCP/HT 6 signals
MCP1NotSend:
BOOL:= FALSE;
// 0: Send and receive mode is active
MCP2NotSend:
BOOL:= FALSE;
// 1: Only reception of the MCP/HT 6 signals
Notice
A maximum of two MCP/HT 6 can be operated on an MPI line. To be able to
use MCP and HT 6 on an automation system alternately or simultaneously, the
user (machine manufacturer) has to adapt the PLC program accordingly.
For a detailed description of the basic PLC program or of function block FB1,
please refer to:
/FB1/
Description of Functions, Basic Machine: P3, Basic PLC Program
Section: FB 1: RUN_UP Basic program, start-up section
Setting the
communication
parameters (FB 1)
References
5 MPI Communication
Содержание SINUMERIK 840Di
Страница 1: ...Manual 06 2003 Edition SINUMERIK 840Di ...
Страница 2: ......
Страница 522: ...06 03 A 522 Siemens AG 2003 All rights reserved SINUMERIK 840Di Manual HBI 06 03 Edition A Abbreviations Notes ...
Страница 548: ...06 03 Index 548 Siemens AG 2003 All rights reserved SINUMERIK 840Di Manual HBI 06 03 Edition Index ...
Страница 550: ......







































































