





























Chapter 5. Power Supply / CPU
5-16
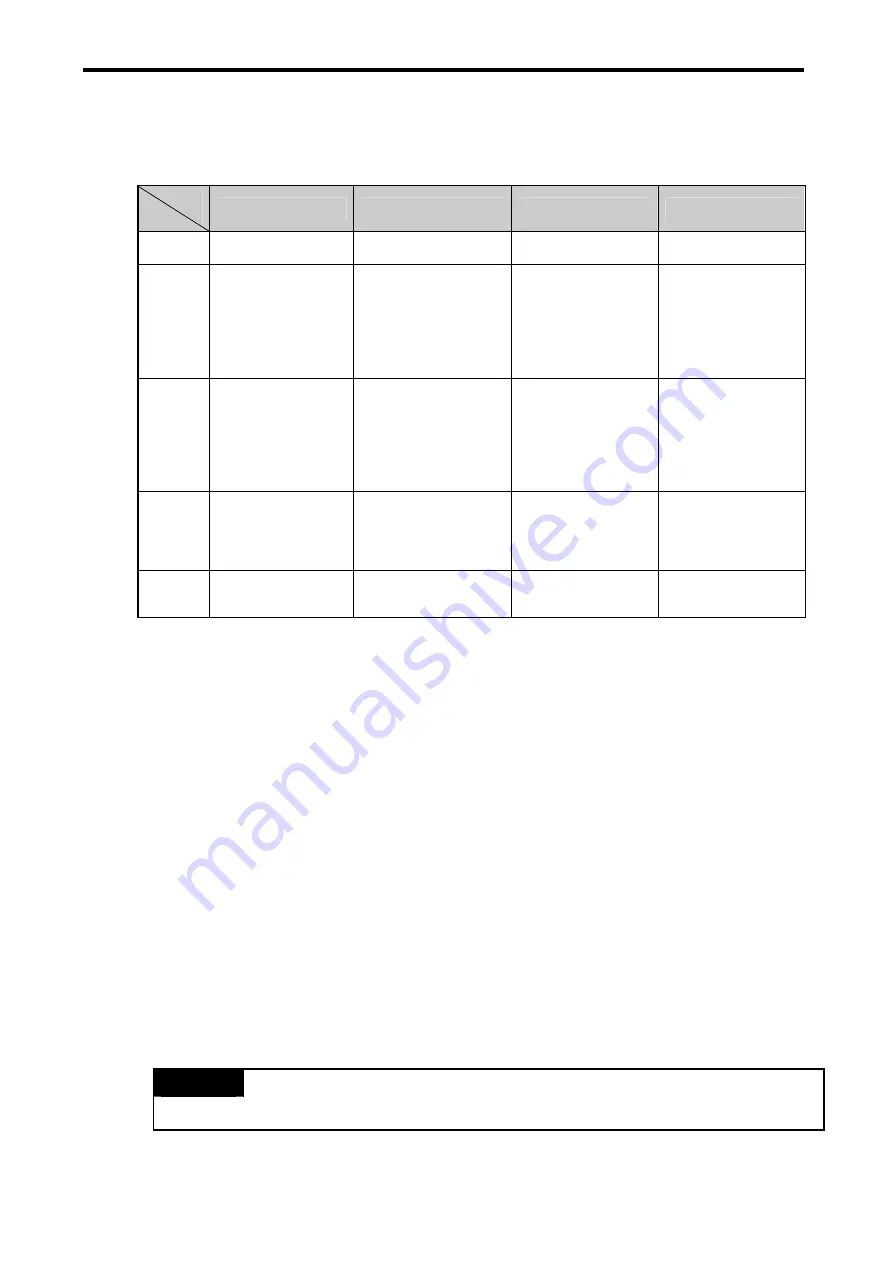
1) Task types and functions
The following table shows the types and functions of tasks.
Type
Size
Time driven task
External interrupt task
Internal interrupt task
High speed task
Number 8
8
8
4
Start up
condition
Time driven interrupt
(up to 4,294,967.29
sec by the 10 ms)
At the rising / falling /
rising ·falling edge of the
input contact
(IX0.0.0~IX0.0.7)
The rising edge or on
state of the BOOL
variable data which has
been specified of buffer
data.
Using HSC parameter
Detection
and
execution
Executed periodically
as setting time
Immediately executed at
the rising / falling / rising
·falling edge of the
input contact
(IX0.0.0~IX0.0.7)
Executed with edge
detection after scan
program has been
finished.
When reaches the SV,
it executes.
Detection
delay time
Up to 1 ms delay
10
㎲
2 points
(IX0.0.0 ~ IX0.0.1)
50
㎲
6 points
(IX0.0.2 ~ IX0.0.7)
Delayed for the same
time as max. scan time.
10
㎲
2 points
(IX0.0.0 ~ IX0.0.1)
50
㎲
6 points
(IX0.0.2 ~ IX0.0.7)
Execution
priority
Level 0 to 7 (Level 0
has highest priority)
Level 0 to 7 (Level 0 has
highest priority)
Level 0 to 7 (Level 0
has highest priority)
Level 0 to 7 (Level 0
has highest priority)
2) Task program processing method
The following explains the common processing method and instructions for task programs.
(1) Task program characteristics
• The task program will be executed when an execution condition is satisfied while the scan program is repeatedly
processed at every scan. Be sure to consider that point when writing a task program
• For example, if a timer and a counter have been used in a 10 sec cycle time driven task program, the timer can
occur up to 10 sec error and an input which has been changed within 10 sec will not be counted because the
counter checks its input status every 10 sec.
(2) Execution priority
• The higher priority task program will be executed firstly.
• If a newly invoked task has higher priority than that of existing tasks which are under execution, they are temporary
stopped and task has higher priority will be executed.
• When determining the priority of a task program, consider the characteristics, importance and urgency of the
program.
REMARK
1) The priority for GM7U can’t be set as the same. If it is set as the same, an error will occur.
Содержание GLOFA G7M-DR20U
Страница 28: ...Chapter 4 Names of Parts 4 3 2 G7M DRT60U N 3 G7M DT60U N 4 G7M DT60U P...
Страница 29: ...Chapter 4 Names of Parts 4 4 5 G7M DR60U DC 6 G7M DRT60U N DC 7 G7M DT60U N DC...
Страница 30: ...Chapter 4 Names of Parts 4 5 8 G7M DT60U P DC 4 1 2 40 point main unit 1 G7M DR40U 2 G7M DRT40U N...
Страница 31: ...Chapter 4 Names of Parts 4 6 3 G7M DT40U N 4 G7M DT40U P 5 G7M DR40U DC...
Страница 32: ...Chapter 4 Names of Parts 4 7 6 G7M DRT40U N DC 7 G7M DT40U N DC 8 G7M DT40U P DC...
Страница 33: ...Chapter 4 Names of Parts 4 8 4 1 3 30 point main unit 1 G7M DR30U 2 G7M DRT30U N 3 G7M DT30U N...
Страница 34: ...Chapter 4 Names of Parts 4 9 4 G7M DT30U P 5 G7M DR30U DC 6 G7M DRT30U N DC...
Страница 35: ...Chapter 4 Names of Parts 4 10 7 G7M DT30U N DC 8 G7M DT30U P DC 4 1 4 20 point main unit 1 G7M DR20U...
Страница 36: ...Chapter 4 Names of Parts 4 11 2 G7M DRT20U N 3 G7M DT20U N 4 G7M DT20U P...
Страница 37: ...Chapter 4 Names of Parts 4 12 5 G7M DR20U DC 6 G7M DRT20U N DC 7 G7M DT20U N DC...
Страница 38: ...Chapter 4 Names of Parts 4 13 8 G7M DT20U P DC...
Страница 159: ...Chapter 7 Usage of Various Functions 7 52 c Program...
Страница 183: ...Chapter 7 Usage of Various Functions 7 76 c Program...
Страница 253: ...Chapter 8 Communication Functions 8 27 b When uses Ch 1 Built in RS 485...
Страница 355: ...Appendix 1 System Definitions App1 8 5 PID parameters 1 PID Auto Tuning Parameter 2 PID Parameter...
Страница 356: ...Appendix 1 System Definitions App1 9 6 Position Parameter...
Страница 357: ...Appendix 1 System Definitions App1 10 7 High Speed Counter Parameter...







































































