





























Chapter 7. Usage of Various Functions
7-20
2) Specification
(1)
Control operation
(a)
Proportional operation (P operation)
(a)
P action means a control action that obtain a manipulate value which is proportional to the deviation (E : the
difference between SV and PV)
(b)
The deviation (E) is obtained by multiplying a reference value to the actual difference between SV and PV. It
prevents the deviation from a sudden change or alteration caused by external disturbance. The formula of
deviation is as following;
(c) E happens, MV by P operation is like Fig.7.1
Fig 7.1 MV by P operation
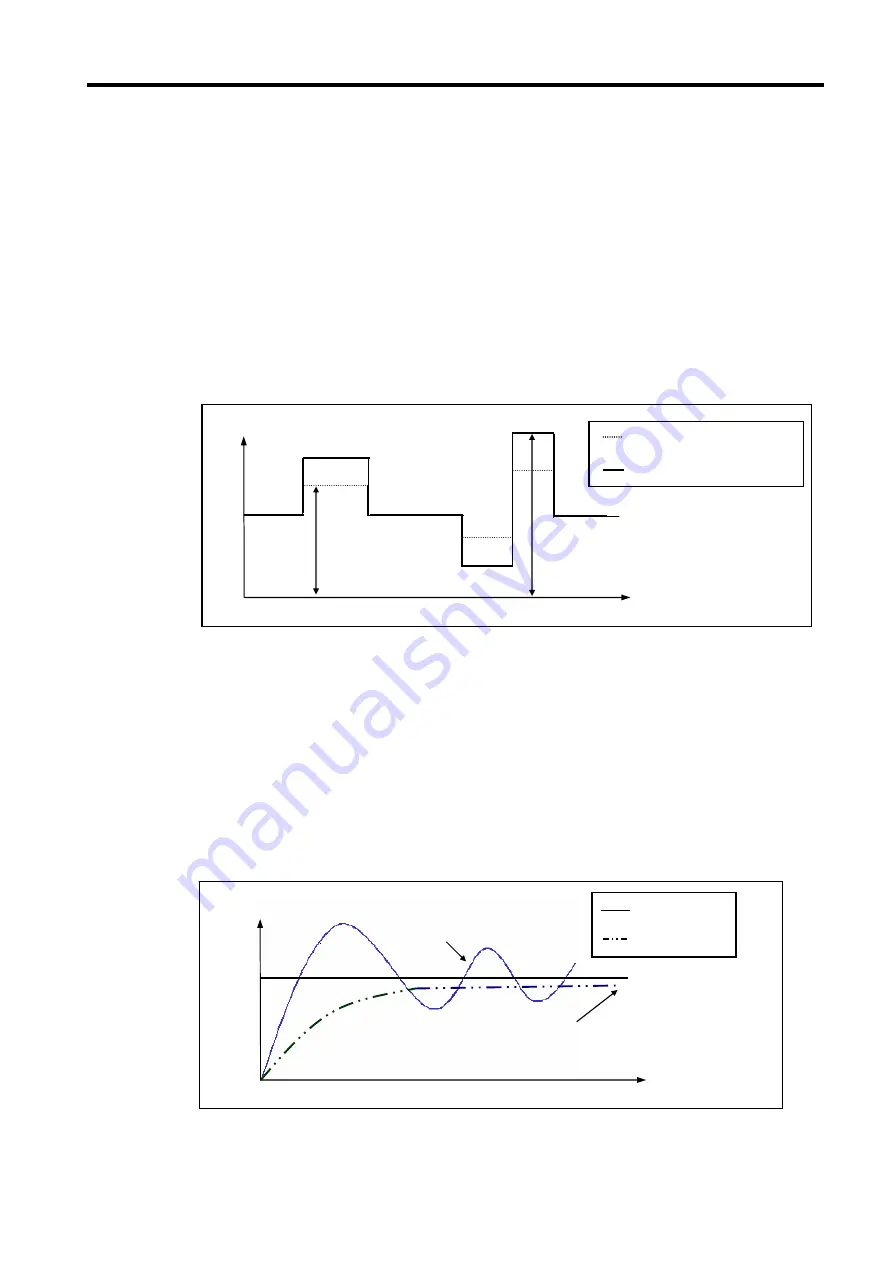
(d) If the Kp is too large, the PV reaches to the SV swiftly, but it may causes a bad effect like oscillations.
(e) If the Kp is too small, oscillation will not occur. However, the PV reaches to the SV slowly and an offset may
appear between PV and SV shown in the Fig. 7.2.
(f) The manipulation value (MV) varies from 0 to 4,000. User can define the maximum value of MV (MV_MAX)
and minimum value (MV_MIN) within the range 0 ~ 4,000.
(g) When an offset remains after the system is stabilized, the PV can be reached to the SV by adding a certain
value. This value is called as bias value, and user can define the bias value
Fig. 7.2 The relation between Proportional constant (Kp) and present value (PV)
Time
:
Deviation
:
Manipulating
value
Deviation(E)
Manipulate value (MV)
Time
PV
SV
Oscillation
Offset
: Kp is too large
: Kp is too small
E
K
MV
P
×
=
Содержание GLOFA G7M-DR20U
Страница 28: ...Chapter 4 Names of Parts 4 3 2 G7M DRT60U N 3 G7M DT60U N 4 G7M DT60U P...
Страница 29: ...Chapter 4 Names of Parts 4 4 5 G7M DR60U DC 6 G7M DRT60U N DC 7 G7M DT60U N DC...
Страница 30: ...Chapter 4 Names of Parts 4 5 8 G7M DT60U P DC 4 1 2 40 point main unit 1 G7M DR40U 2 G7M DRT40U N...
Страница 31: ...Chapter 4 Names of Parts 4 6 3 G7M DT40U N 4 G7M DT40U P 5 G7M DR40U DC...
Страница 32: ...Chapter 4 Names of Parts 4 7 6 G7M DRT40U N DC 7 G7M DT40U N DC 8 G7M DT40U P DC...
Страница 33: ...Chapter 4 Names of Parts 4 8 4 1 3 30 point main unit 1 G7M DR30U 2 G7M DRT30U N 3 G7M DT30U N...
Страница 34: ...Chapter 4 Names of Parts 4 9 4 G7M DT30U P 5 G7M DR30U DC 6 G7M DRT30U N DC...
Страница 35: ...Chapter 4 Names of Parts 4 10 7 G7M DT30U N DC 8 G7M DT30U P DC 4 1 4 20 point main unit 1 G7M DR20U...
Страница 36: ...Chapter 4 Names of Parts 4 11 2 G7M DRT20U N 3 G7M DT20U N 4 G7M DT20U P...
Страница 37: ...Chapter 4 Names of Parts 4 12 5 G7M DR20U DC 6 G7M DRT20U N DC 7 G7M DT20U N DC...
Страница 38: ...Chapter 4 Names of Parts 4 13 8 G7M DT20U P DC...
Страница 159: ...Chapter 7 Usage of Various Functions 7 52 c Program...
Страница 183: ...Chapter 7 Usage of Various Functions 7 76 c Program...
Страница 253: ...Chapter 8 Communication Functions 8 27 b When uses Ch 1 Built in RS 485...
Страница 355: ...Appendix 1 System Definitions App1 8 5 PID parameters 1 PID Auto Tuning Parameter 2 PID Parameter...
Страница 356: ...Appendix 1 System Definitions App1 9 6 Position Parameter...
Страница 357: ...Appendix 1 System Definitions App1 10 7 High Speed Counter Parameter...







































































