























Chapter 7. Usage of Various Functions
7-90
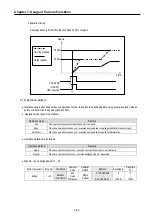
8) JOG Operation (POSJOG : Level input)
(1) JOG operation
•
Carries out the positioning control by Jog command(POSJOG).
•
Carries out the monitoring when the positioning acts by JOG command and the position address is changed.
•
This is used when acting without origin determination.
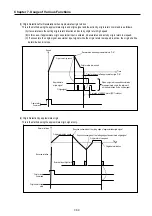
(2) Acceleration/Deceleration Processing and Jog speed
(A) The acceleration/deceleration processing is controlled based on the setting time of JOG acceleration/ deceleration
time from parameter setting.
•
Jog high speed operation : operation pattern with acceleration/deceleration
•
Jog low speed operation : operation pattern without acceleration/deceleration
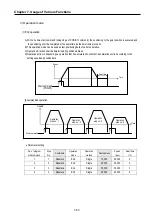
(B) If speed operand of POSJOG command as device not constant, JOG speed can be changed from low speed to high
speed or high speed to low speed during operation
(C) If Jog speed is set out of the setting range, error will occur and the operation does not work.
Jog high speed operation
5
∼
100,000 pps
Setting range
Jog low speed operation
5
∼
100,000 pps
(Setting unit :1pps)
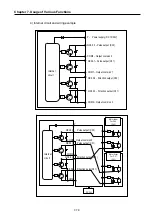
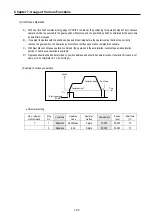
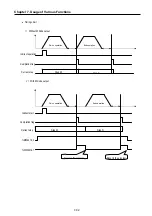
9) Speed Override Command(POSSOR : Rising edge
↑
))
•
This is used to change the operation speed from operation data of step no. in operation of each axis
•
This command is used only in Acceleration and Constant speed section from operation pattern.
•
Setting range is 5 ~ 100,000
•
This command can be used in position control and speed control.
If POSSOR is executed in deceleration section, error code H44 will occur and continues operation
Time
Speed
Time
Speed
Remark
Содержание GLOFA G7M-DR20U
Страница 28: ...Chapter 4 Names of Parts 4 3 2 G7M DRT60U N 3 G7M DT60U N 4 G7M DT60U P...
Страница 29: ...Chapter 4 Names of Parts 4 4 5 G7M DR60U DC 6 G7M DRT60U N DC 7 G7M DT60U N DC...
Страница 30: ...Chapter 4 Names of Parts 4 5 8 G7M DT60U P DC 4 1 2 40 point main unit 1 G7M DR40U 2 G7M DRT40U N...
Страница 31: ...Chapter 4 Names of Parts 4 6 3 G7M DT40U N 4 G7M DT40U P 5 G7M DR40U DC...
Страница 32: ...Chapter 4 Names of Parts 4 7 6 G7M DRT40U N DC 7 G7M DT40U N DC 8 G7M DT40U P DC...
Страница 33: ...Chapter 4 Names of Parts 4 8 4 1 3 30 point main unit 1 G7M DR30U 2 G7M DRT30U N 3 G7M DT30U N...
Страница 34: ...Chapter 4 Names of Parts 4 9 4 G7M DT30U P 5 G7M DR30U DC 6 G7M DRT30U N DC...
Страница 35: ...Chapter 4 Names of Parts 4 10 7 G7M DT30U N DC 8 G7M DT30U P DC 4 1 4 20 point main unit 1 G7M DR20U...
Страница 36: ...Chapter 4 Names of Parts 4 11 2 G7M DRT20U N 3 G7M DT20U N 4 G7M DT20U P...
Страница 37: ...Chapter 4 Names of Parts 4 12 5 G7M DR20U DC 6 G7M DRT20U N DC 7 G7M DT20U N DC...
Страница 38: ...Chapter 4 Names of Parts 4 13 8 G7M DT20U P DC...
Страница 159: ...Chapter 7 Usage of Various Functions 7 52 c Program...
Страница 183: ...Chapter 7 Usage of Various Functions 7 76 c Program...
Страница 253: ...Chapter 8 Communication Functions 8 27 b When uses Ch 1 Built in RS 485...
Страница 355: ...Appendix 1 System Definitions App1 8 5 PID parameters 1 PID Auto Tuning Parameter 2 PID Parameter...
Страница 356: ...Appendix 1 System Definitions App1 9 6 Position Parameter...
Страница 357: ...Appendix 1 System Definitions App1 10 7 High Speed Counter Parameter...







































































