





























NOVA electronics Inc.
MCX514 -
15
-
15
-
2. The Descriptions of Functions
2.1
Fixed Pulse Driving and Continuous Pulse Driving
There are two kinds of pulse output commands: fixed pulse driving that is performed based on the number of output pulses
predetermined and continuous pulse driving that outputs pulses until a stop command is written or stop signal is input. Fixed pulse
driving has relative position driving, absolute position driving and counter relative position driving. Continuous pulse driving has
+
direction continuous pulse driving and
-
direction continuous pulse driving.
•
Fixed pulse driving
・
Relative position driving
・
Absolute position driving
・
Counter relative position driving
•
Continuous pulse driving
・
+
Direction continuous pulse driving
・
-
Direction continuous pulse driving
2.1.1
Relative Position Driving
Relative position driving performs the driving by setting the drive pulse number from the current position. To drive from the
current position to the
+
direction, set the positive pulse number in the drive pulse number, and to the
-
direction, set the
negative pulse number in the drive pulse number.
Current position
+
direction
-
direction
To the
+
direction
20,000 pulses
To the
-
direction
20,000 pulses
TP
:
- 20,000
TP
:
+20,000
Fig. 2.1-1 Setting Example of Drive Pulse Number (TP) in Relative Position Driving
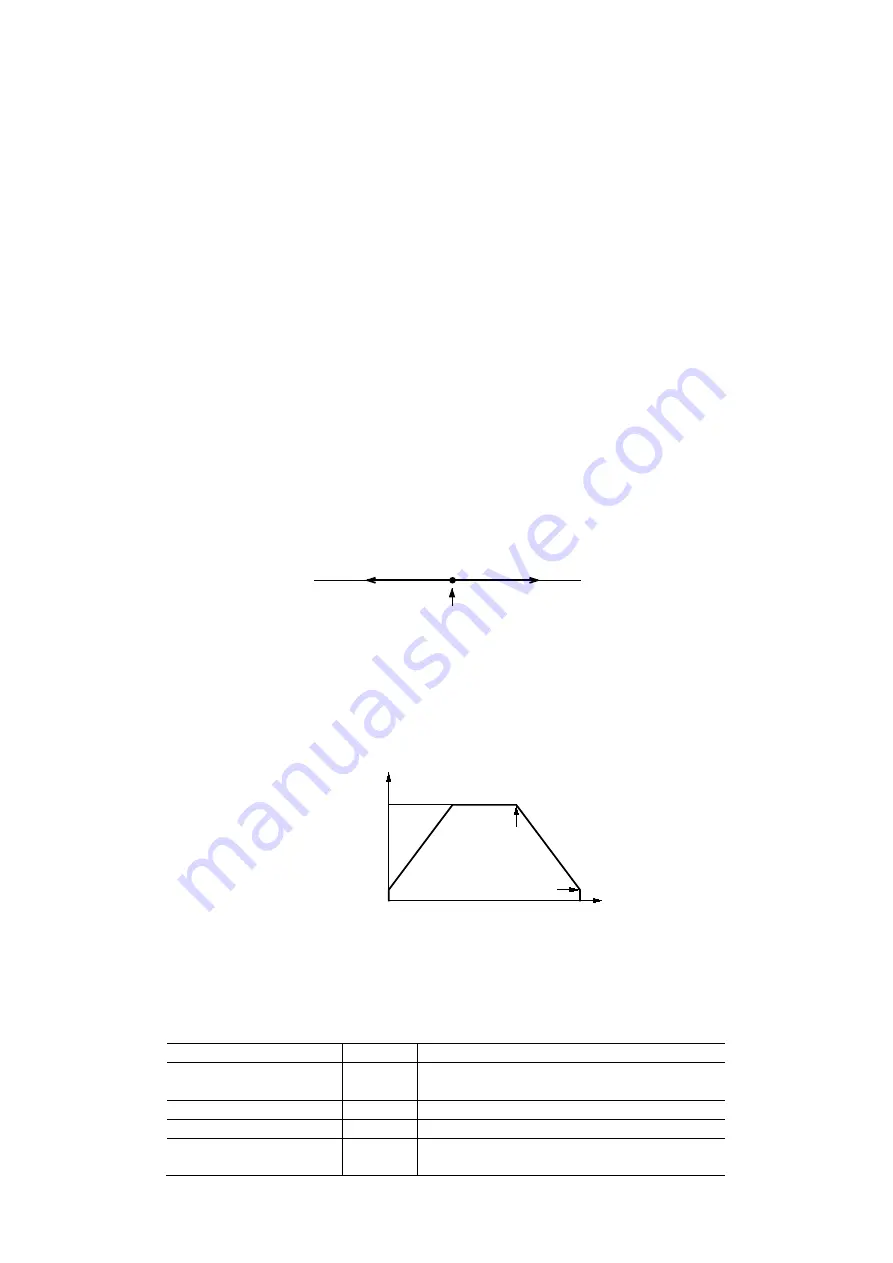
Relative position driving performs constant speed driving or acceleration / deceleration driving. Relative position driving in the
acceleration / deceleration where acceleration and deceleration are equal, as shown in Fig. 2.1-2, automatic deceleration starts
when the number of pulses becomes less than the number of pulses that were utilized at acceleration, and driving terminates when
the output of specified drive pulses is completed.
Speed
time
Initial Speed
Driving Speed
Auto Deceleration
Stop Specific
Output Pulse
Fig. 2.1-2 Auto Deceleration and Stop in Relative Position Driving
Command code for relative position driving is 50h. To perform relative position driving in linear acceleration / deceleration, the
following parameters must be set.
Table 2.1-1
Setting Parameters
:
Relative Position Driving
Parameter
Symbol
Comment
Acceleration / Deceleration
AC
/
DC
No need to set deceleration when acceleration and
deceleration are equal.
Initial speed
SV
Drive speed
DV
Drive pulse number /
Finish point
TP
Set
+
pulse number for the
+
direction.
Set
-
pulse number for the
-
direction.





















































