





























4 - 19 4 - 19
MELSEC-Q
4 DATA USED FOR POSITIONING CONTROL
OPR. 7
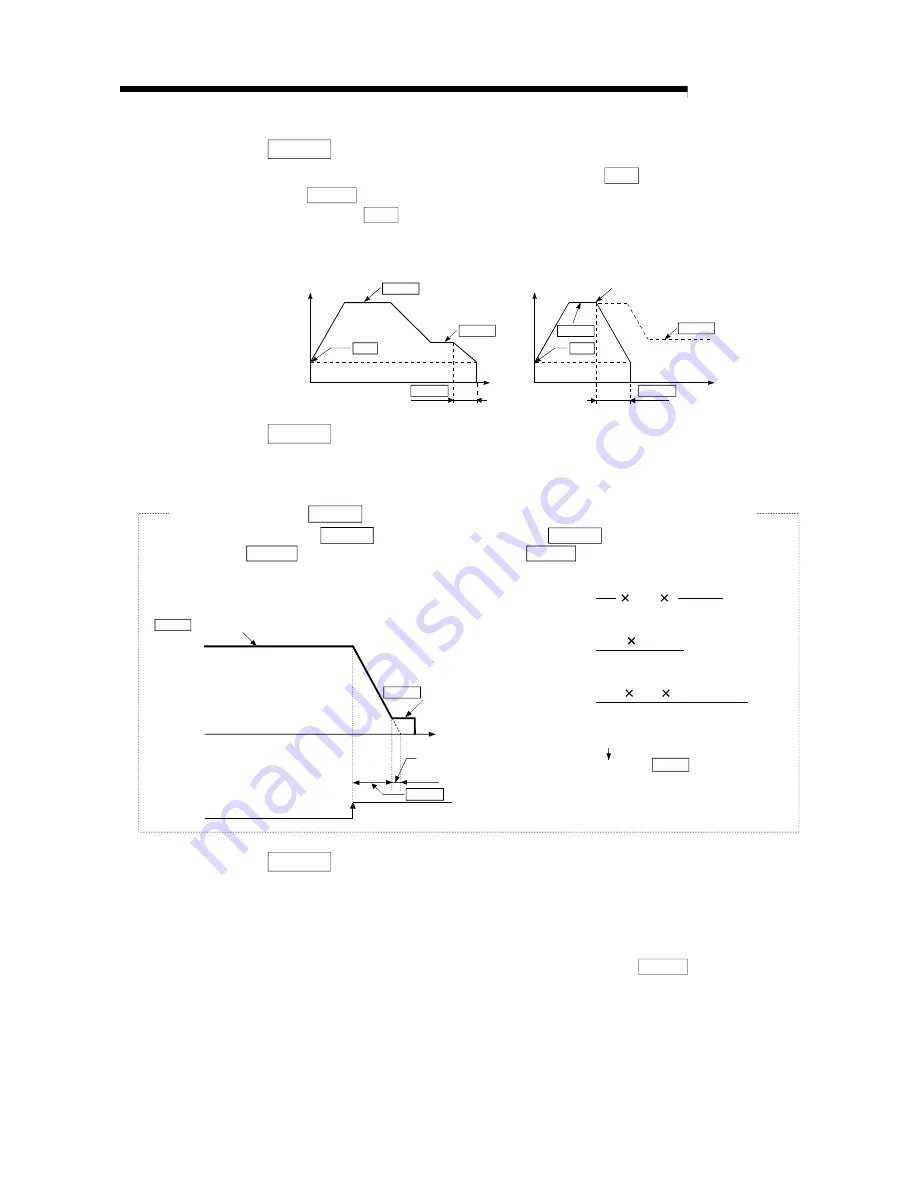
DEC/STOP time at OPR
Set the time taken to make a stop after reaching " Pr. 6 Bias speed at start" from
"OPR. 5 Creep speed" under "Count 2" OPR control or to make a stop after
reaching " Pr. 6 Bias speed at start" from the speed during OPR control at axis
stop factor occurrence (axis stop signal ON or error occurrence).
Pr. 6
OPR. 7
OPR. 4
OPR. 5
t
V
t
V
OPR. 4
OPR. 5
Pr. 6
OPR. 7
(When OPR method is "Count 2")
(When axis stop signal is turned ON during
OPR control (Common to all OPR methods))
Axis stop factor occurrence
OPR. 8
Setting for the movement amount after near-point dog ON
When the OPR method is Count 1 or 2, set a value not less than the deceleration
distance after the near-point dog signal has turned ON.
=
1
2
2000
Vz
t + t'
1000
2000
10 10 (320 + 80)
3
2000
80ms : t'
OFF
ON
Setting example of " OPR. 8 Setting for the movement amount after near-point dog ON"
When 10kpulse/s is set in " OPR. 4 OPR speed", 2kpulse/s in " OPR. 5 Creep speed",
and 320ms in " OPR. 6 ACC/DEC time at OPR", calculate " OPR. 8 Setting for the movement amount
after near-point dog ON" as indicated below.
[OPR control operation]
OPR. 4 OPR speed : Vz=10kpulse/s
Near-point dog
OPR. 5 Creep speed: Vc=2kpulse/s
OPR. 6 ACC/DEC time at OPR : t=320ms
[Deceleration distance]
*Set 2000 pulse or more in " OPR. 8 Setting for the
movement amount after near-point dog ON".
=
Vz (t + t')
=
=
OPR. 9
OPR dwell time
When the OPR method is Stopper 1, set the time from when the near-point dog
turns ON until OPR control is completed.
Set not less than the movement time from when the near-point dog turns ON until
a stop is made by the stopper.
(When the OPR method is other than "Stopper 1", the "OPR. 9 OPR dwell time"
value need not be set.)
Summary of Contents for GX Configurator-PT
Page 13: ...MEMO SECTION 1...
Page 127: ...7 20 7 20 MELSEC Q 7 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL MEMO...
Page 129: ...MEMO SECTION 2...
Page 221: ...Index 5 Index 5 MEMO...







































































