





























4 - 15 4 - 15
MELSEC-Q
4 DATA USED FOR POSITIONING CONTROL
OPR method
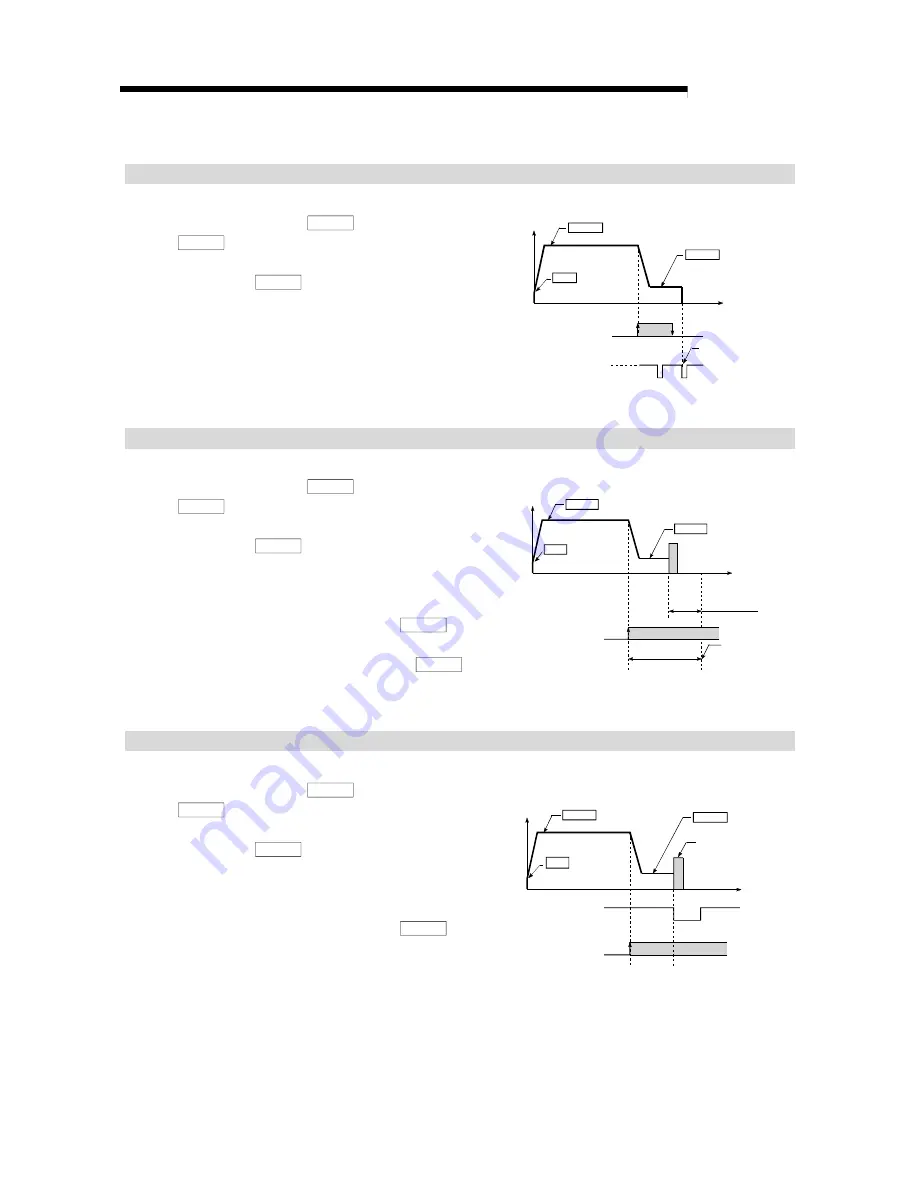
0 : Near-point dog method
(1) Start machine OPR control.
(Start movement at the " OPR. 4 OPR speed" in the
" OPR. 2 OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to " OPR. 5 Creep speed", and move with the
creep speed.
(At this time, the near-point dog must be ON.)
(4) When the first zero signal (one pulse of which is output
when the motor turns one revolution) after near-point dog
OFF is detected, the pulse output from the QD70 stops and
OPR control is completed.
t
V
ON
(1)
(2)
(3)
(4)
OPR. 4 OPR speed
Pr. 6 Bias speed
at start
OPR. 5 Creep speed
Near-point dog OFF
Zero signal
First zero after
near-point dog OFF
1 : Stopper 1
(1) Start machine OPR control.
(Start movement at the " OPR. 4 OPR speed" in the
" OPR. 2 OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to " OPR. 5 Creep speed", and move with the
creep speed.
(At this time, a torque limit is needed for the motor. If there is
no torque limit, the motor may fail at (4).)
(4) The axis contacts against the stopper at " OPR. 5 Creep
speed", and then stops.
(5) When the near-point dog turns ON and the " OPR. 9 OPR
dwell time" is passed, the pulse output from the QD70
stops, and the OPR control is completed.
t
V
(1)
(2)
(3)
(4)
(5)
ON
OPR. 4 OPR speed
Pr. 6 Bias speed
at start
OPR. 5 Creep speed
Range where motor
rotation is forcibly
stopped by stopper
Near-point dog OFF
Dwell time out
Dwell time
counting
2 : Stopper 2
(1) Start machine OPR control.
(Start movement at the " OPR. 4 OPR speed" in the
" OPR. 2 OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to " OPR. 5 Creep speed", and move with the
creep speed.
(At this time, a torque limit is needed for the motor. If there is
no torque limit, the motor may fail at (4).)
(4) The axis contacts against the stopper at " OPR. 5 Creep
speed", and then stops.
(5) When the zero signal (signal output on detection of contact
with the stopper) is detected after a stop, the pulse output
from the QD70 stops and OPR control is completed.
t
V
ON
(1)
(2)
(3)
(4)
(5)
OPR. 4 OPR speed
Pr. 6 Bias speed
at start
OPR. 5 Creep speed
Stopped by stopper
Zero signal
Near-point dog OFF
Summary of Contents for GX Configurator-PT
Page 13: ...MEMO SECTION 1...
Page 127: ...7 20 7 20 MELSEC Q 7 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL MEMO...
Page 129: ...MEMO SECTION 2...
Page 221: ...Index 5 Index 5 MEMO...







































































