



















5 - 9
5. PARAMETERS
Class No. Symbol
Name and Function
Initial
value
Unit
Setting
range
B
asi
c pa
ra
met
ers
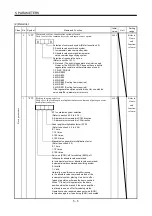
18 *DMD Status
display
selection
Used to select the status display shown at power-on. (Refer to section 7.2)
Status display on servo amplifier display
at power-on
00: Current position (initial value)
01: Command position
02: Command remaining distance
03: Point table No.
04: Cumulative feedback pulses
05: Servo motor speed
06: Droop pulses
07: Override voltage
08: Analog torque limit voltage
09: Regenerative load ratio
0A: Effective load ratio
0B: Peak load ratio
0C: Instantaneous torque
0D: Within one-revolution position low
0E: Within one-revolution position high
0F: ABS counter
10: Load inertia moment ratio
11: Bus voltage
Status display of MR-DP60 at power-on
00: Current position (initial value)
01: Command position
02: Command remaining distance
03: Point table No.
04: Cumulative feedback pulses
05: Servo motor speed
06: Droop pulses
07: Override voltage
08: Analog torque limit voltage
09: Regenerative load ratio
0A: Effective load ratio
0B: Peak load ratio
0C: Instantaneous torque
0D: Within one-revolution position
0E: ABS counter
0F: Load inertia moment ratio
10: Bus voltage
0000
Refer to
Name
and
function
column.
Summary of Contents for MR-J2S-10CP
Page 11: ...A 10 MEMO ...
Page 19: ...8 MEMO ...
Page 45: ...1 26 1 FUNCTIONS AND CONFIGURATION MEMO ...
Page 181: ...6 20 6 MR Configurator SERVO CONFIGURATION SOFTWARE MEMO ...
Page 207: ...7 26 7 DISPLAY AND OPERATION MEMO ...
Page 219: ...8 12 8 GENERAL GAIN ADJUSTMENT MEMO ...
Page 229: ...9 10 9 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 231: ...10 2 10 INSPECTION MEMO ...
Page 249: ...12 8 12 OUTLINE DIMENSION DRAWINGS MEMO ...
Page 257: ...13 8 13 CHARACTERISTICS MEMO ...