



























1 - 3
1. FUNCTIONS AND CONFIGURATION
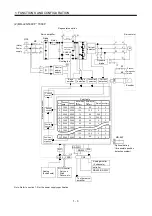
(2) MR-J2S-500CP 700CP
1000
0
80
100
100
0
(Note)
Power
supply
NFB
MC
Servo amplifier
Regenerative option
P
N
C
Diode
stack
Relay
L
1
L
2
L
3
CHARGE
lamp
Regenerative
transistor
Dynamic
brake
Current
detector
Servo motor
M
U
V
W
U
V
W
B2
B1
Encoder
Electro-
magnetic
brake
CN2
L
11
L
21
Cooling fan
Base
amplifier
Voltage
detection
Overcurrent
protection
Control
power
supply
Current
detection
Point table
I/F
A/D
CN1A CN1B
RS-232C
RS-422
D/A
CN3
CON1
MR-BAT
Optional battery
(for absolute position
detection system)
D I/O control
Servo on
Start
Failure, etc.
Analog
(2 channels)
To other servo
amplifier
RS-422/RS-232C
Controller
Analog monitor
(2 channels)
1
31
8
7
6
5
4
3
2
1000
2000
4000
500
1000
2000
1000
1000
2000 2000
1000
1000
2000
2000
2000
2000
1000
80
100
70
60
80
80
80
100
80
80
100
70
60
80
80
100
80
1000
500
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
No.
Mo
del
a
dap
tive
co
ntr
ol
Current
control
Position
control
Speed
control
Position
command
creation
Auxiliary
Dwell
Position
data
Speed
Acceleration
time
constant
Deceleration
time
constant
1000
Note. Refer to section 1.2 for the power supply specification.
Summary of Contents for MR-J2S-10CP
Page 11: ...A 10 MEMO ...
Page 19: ...8 MEMO ...
Page 45: ...1 26 1 FUNCTIONS AND CONFIGURATION MEMO ...
Page 181: ...6 20 6 MR Configurator SERVO CONFIGURATION SOFTWARE MEMO ...
Page 207: ...7 26 7 DISPLAY AND OPERATION MEMO ...
Page 219: ...8 12 8 GENERAL GAIN ADJUSTMENT MEMO ...
Page 229: ...9 10 9 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 231: ...10 2 10 INSPECTION MEMO ...
Page 249: ...12 8 12 OUTLINE DIMENSION DRAWINGS MEMO ...
Page 257: ...13 8 13 CHARACTERISTICS MEMO ...







































































