





























8 - 7
8. GENERAL GAIN ADJUSTMENT
8.3 Manual mode 1 (simple manual adjustment)
If you are not satisfied with the adjustment of auto tuning, you can make simple manual adjustment with
three parameters.
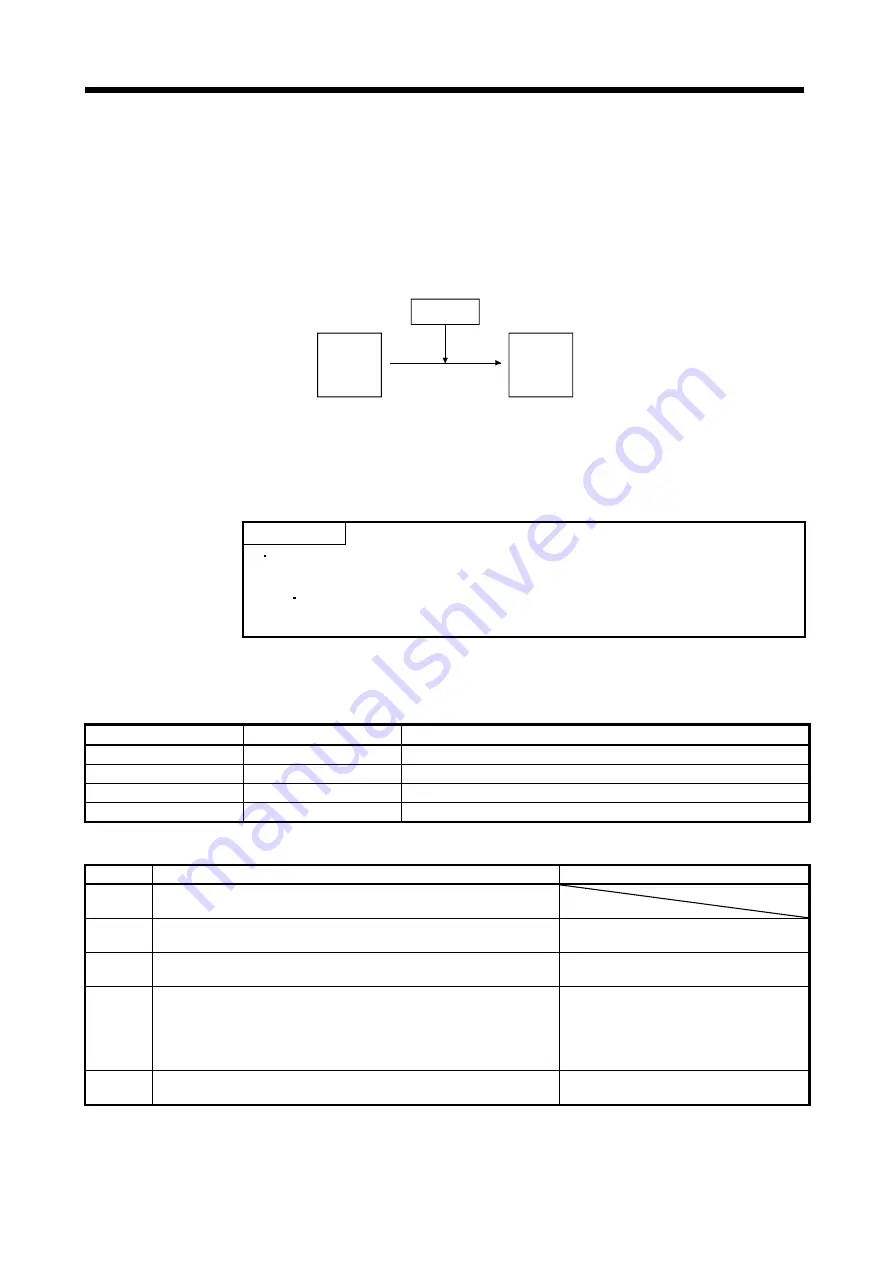
8.3.1 Operation of manual mode 1
In this mode, setting the three gains of position control gain 1 (PG1), speed control gain 2 (VG2) and
speed integral compensation (VIC) automatically sets the other gains to the optimum values according to
these gains.
PG1
VG2
VIC
PG2
VG1
GD2
Automatic setting
User setting
Therefore, you can adjust the model adaptive control system in the same image as the general PI control
system (position gain, speed gain, speed integral time constant). Here, the position gain corresponds to
PG1, the speed gain to VG2 and the speed integral time constant to VIC. When making gain adjustment
in this mode, set the load inertia moment ratio (parameter No. 34) correctly.
8.3.2 Adjustment by manual mode 1
POINT
If machine resonance occurs, adaptive vibration suppression control
(parameter No. 63) or machine resonance suppression filter (parameter No.
61 62) may be used to suppress machine resonance. (Refer to section 9.2,
9.3.)
(1) For speed control
(a) Parameters
The following parameters are used for gain adjustment.
Parameter No.
Abbreviation
Name
7
PG1
Position control gain 1
34
GD2
Ratio of load inertia moment to servo motor inertia moment
37
VG2
Speed control gain 2
38
VIC
Speed integral compensation
(b) Adjustment procedure
Step Operation
Description
1
Set an estimated value to the ratio of load inertia moment to servo motor
inertia moment (parameter No. 34).
2
Increase the speed control gain 2 (parameter No. 37) within the vibration-
and unusual noise-free range, and return slightly if vibration takes place.
Increase the speed control gain.
3
Decrease the speed integral compensation (parameter No. 38) within the
vibration-free range, and return slightly if vibration takes place.
Decrease the time constant of the speed
integral compensation.
4
If the gains cannot be increased due to mechanical system resonance or
the like and the desired response cannot be achieved, response may be
increased by suppressing resonance with adaptive vibration suppression
control or machine resonance suppression filter and then executing steps
2 and 3.
Suppression of machine resonance.
Refer to section 9.2, 9.3.
5
While checking the settling characteristic and rotational status, fine-
adjust each gain.
Fine adjustment
Summary of Contents for MR-J2S-10CP
Page 11: ...A 10 MEMO ...
Page 19: ...8 MEMO ...
Page 45: ...1 26 1 FUNCTIONS AND CONFIGURATION MEMO ...
Page 181: ...6 20 6 MR Configurator SERVO CONFIGURATION SOFTWARE MEMO ...
Page 207: ...7 26 7 DISPLAY AND OPERATION MEMO ...
Page 219: ...8 12 8 GENERAL GAIN ADJUSTMENT MEMO ...
Page 229: ...9 10 9 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 231: ...10 2 10 INSPECTION MEMO ...
Page 249: ...12 8 12 OUTLINE DIMENSION DRAWINGS MEMO ...
Page 257: ...13 8 13 CHARACTERISTICS MEMO ...







































































