




























4 - 38
4. OPERATION
4.4.10 Home position return automatic return function
If the current position is at or beyond the proximity dog in the home position return using the proximity
dog, this function starts home position return after making a return to the position where the home
position return can be made.
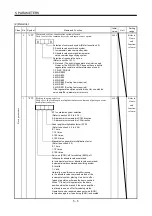
(1) When the current position is at the proximity dog
When the current position is at the proximity dog, an automatic return is made before home position
return.
Home position return
start position
Home position return direction
Proximity dog
Makes an automatic return
to a position before the
proximity dog, then executes
home position return at this position.
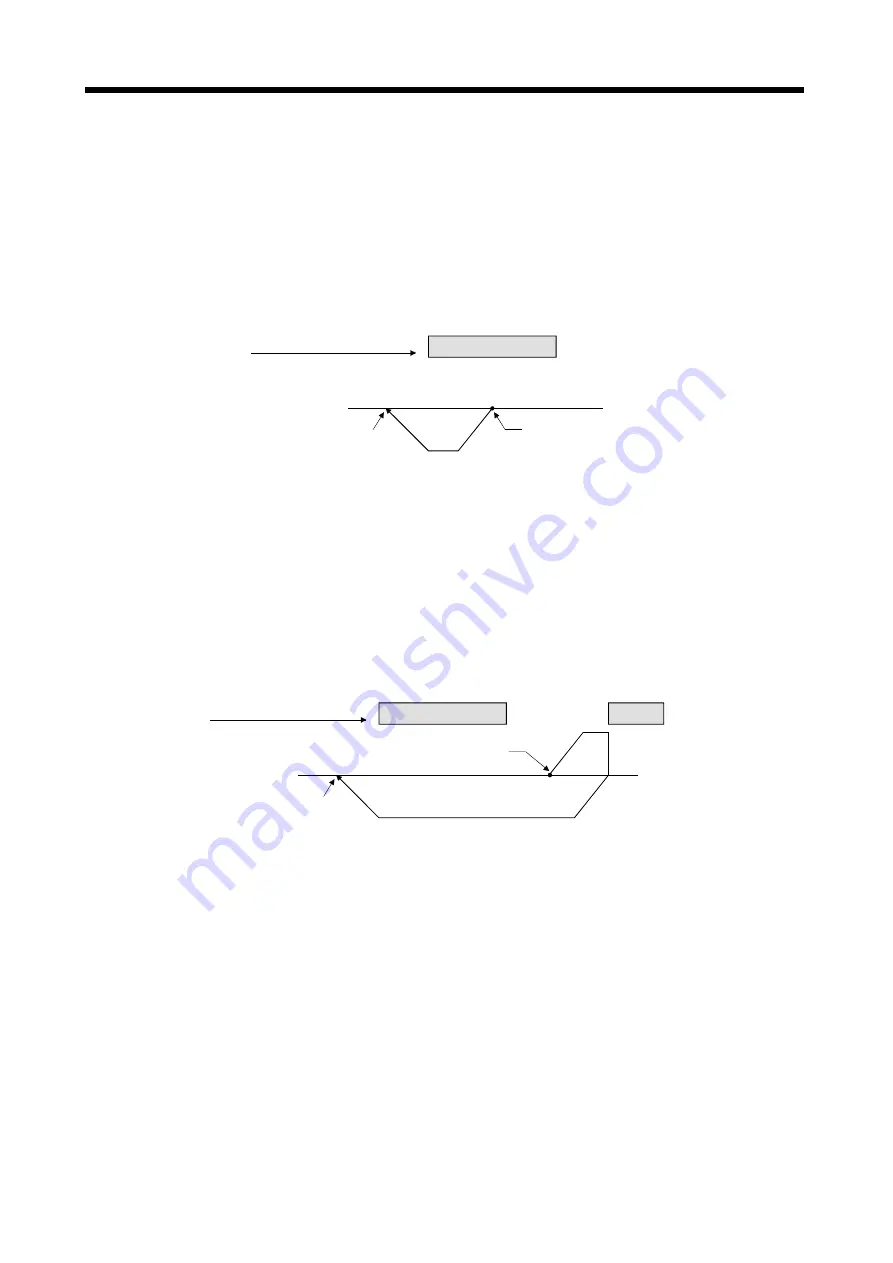
(2) When the current position is beyond the proximity dog
At a start, a motion is made in the home position return direction and an automatic return is made on
detection of the stroke end (LSP or LSN). The motion stops past the front end of the proximity dog,
and home position return is resumed at that position. If the proximity dog cannot be detected, the
motion stops on detection of the opposite LSP or LSN and home position return incomplete warning
(AL. 90) occurs.
Home position return
start position
Home position return direction
Proximity dog
Stroke end
(LSP or LSN)
Makes an automatic return
to a position before the
proximity dog, then executes
home position return at this position.
Software limit cannot be used with these functions.
Summary of Contents for MR-J2S-10CP
Page 11: ...A 10 MEMO ...
Page 19: ...8 MEMO ...
Page 45: ...1 26 1 FUNCTIONS AND CONFIGURATION MEMO ...
Page 181: ...6 20 6 MR Configurator SERVO CONFIGURATION SOFTWARE MEMO ...
Page 207: ...7 26 7 DISPLAY AND OPERATION MEMO ...
Page 219: ...8 12 8 GENERAL GAIN ADJUSTMENT MEMO ...
Page 229: ...9 10 9 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 231: ...10 2 10 INSPECTION MEMO ...
Page 249: ...12 8 12 OUTLINE DIMENSION DRAWINGS MEMO ...
Page 257: ...13 8 13 CHARACTERISTICS MEMO ...






































































