




























4 - 36
4. OPERATION
4.4.8 Count type front end reference home position return
POINT
This home position return method depends on the timing of reading
Proximity dog (DOG) that has detected the front end of a proximity dog.
Hence, if a home position return is made at the home position return speed
of 100r/min, an error of 200 pulses will occur in the home position. The
error of the home position is larger as the home position return speed is
higher.
The position where the axis, which had started decelerating at the front end of a proximity dog, has
moved the after-proximity dog moving distance and home position shift distance is defined as a home
position. A home position return that does not depend on the Z-phase signal can be made. The home
position may change if the home position return speed varies.
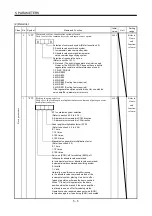
(1) Signals, parameters
Set the input signals and parameters as indicated below.
Item Device/Parameter
used
Description
Automatic/manual selection (MD0) Short (turn on) MD0-SG.
Point table No. selection 1 (DI0)
Open (turn off) DI0-SG.
Manual home position return mode
selection
Point table No. selection 2 (DI1)
Open (turn off) DI1-SG.
Count type dog front end reference
home position return
Parameter No.8
6: Select the count type dog front end reference.
Home position return direction
Parameter No.8
Refer to section 4.4.1 (2) and select the home position return
direction.
Dog input polarity
Parameter No.8
Refer to section 4.4.1 (2) and select the dog input polarity.
Home position return speed
Parameter No.9
Set the speed till the dog is detected.
Creep speed
Parameter No.10
Set the speed after the dog is detected.
Home position shift distance
Parameter No.11
Set when the home position is moved from where the axis has passed
the proximity dog rear end.
Moving distance after proximity dog
Parameter No.43
Set the moving distance after the axis has passed the proximity dog
rear end.
Home position return acceleration/
deceleration time constants
Point table No.1
Use the acceleration/deceleration time constant of point table No. 1.
Home position return position data
Parameter No.42
Use to set the current position on completion of home position return.
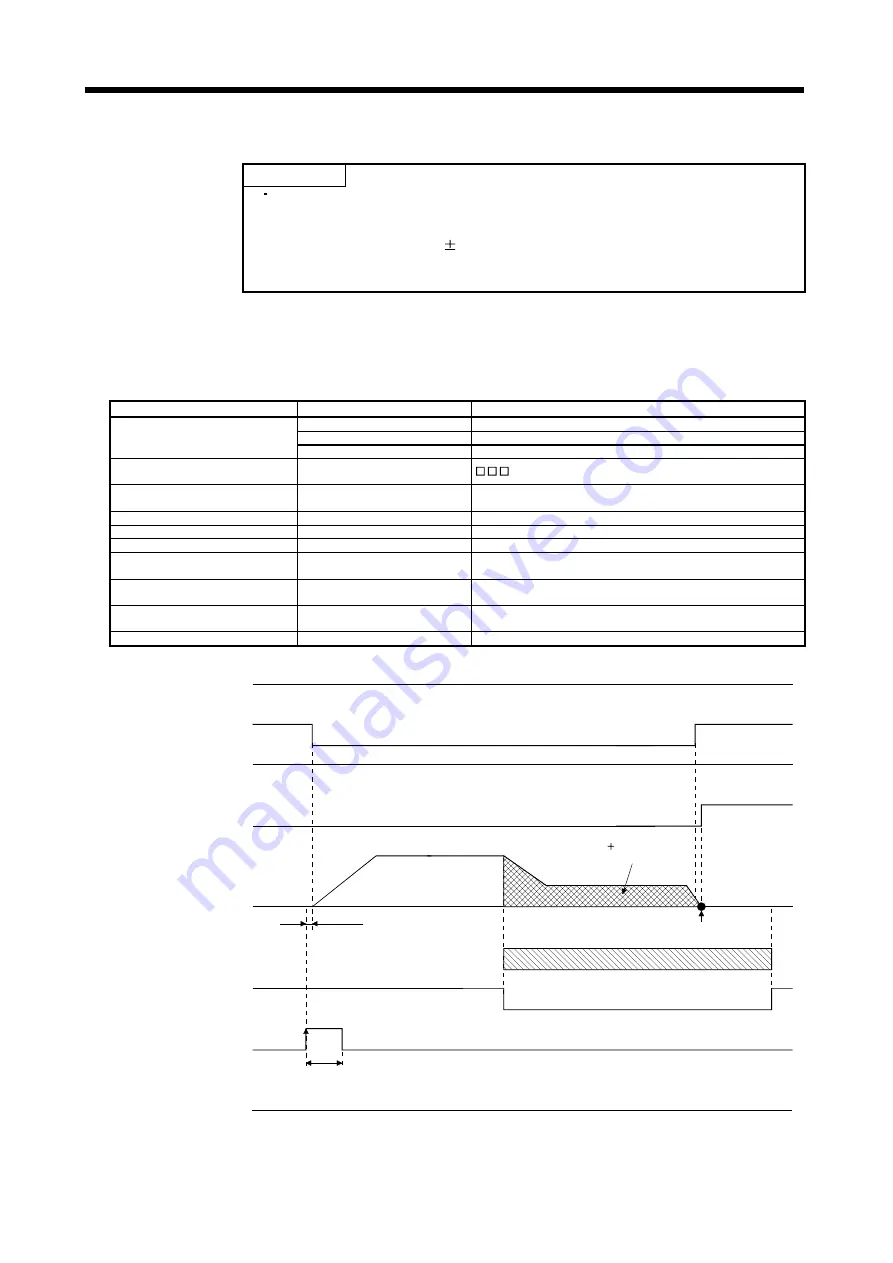
(2) Timing chart
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Movement finish (MEND)
Rough match (CPO)
Home position return
completion (ZP)
Servo motor speed
Proximity dog (DOG)
Forward rotation
start (ST1)
5ms or more
3ms or less
Proximity dog (DOG)
Creep speed
Moving distance after proximity dog
Home position shift distance
Home position return speed
Automatic/manual
selection (MD0)
Home position address
Parameter No. 42
Reverse rotation
start (ST2)
ON
OFF
The parameter No.42 (home position return position data) setting value is the positioning address
after the home position return is completed.
Summary of Contents for MR-J2S-10CP
Page 11: ...A 10 MEMO ...
Page 19: ...8 MEMO ...
Page 45: ...1 26 1 FUNCTIONS AND CONFIGURATION MEMO ...
Page 181: ...6 20 6 MR Configurator SERVO CONFIGURATION SOFTWARE MEMO ...
Page 207: ...7 26 7 DISPLAY AND OPERATION MEMO ...
Page 219: ...8 12 8 GENERAL GAIN ADJUSTMENT MEMO ...
Page 229: ...9 10 9 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 231: ...10 2 10 INSPECTION MEMO ...
Page 249: ...12 8 12 OUTLINE DIMENSION DRAWINGS MEMO ...
Page 257: ...13 8 13 CHARACTERISTICS MEMO ...







































































