




























3 - 6
3. SIGNALS AND WIRING
Device name
Devices
symbol
Connector
pin No.
Functions/Applications
To start operation, short LSP-SG and/or LSN-SG. Open them to bring the motor to
a sudden stop and make it servo-locked.
Set " 1" in parameter No. 22 to make a slow stop.
(Refer to section 5.2.5.)
(Note) Input signal
Operation
LSP LSN
CCW
direction
CW
direction
Forward rotation
stroke end
LSP CN1B
16
1
1
0
1
1
0
0
0
Reverse rotation stroke
end
LSN CN1B
17
Note. 0: LSP/LSN-SG off (open)
1: SP/LSN-SG on (short)
Forward rotation start
ST1 CN1B
8
1. In the case of the absolute value command system.
When ST1-SG are shorted in the automatic operation mode, positioning is
executed once on the basis of the position data set to the point table.
In home position return mode, home position return starts as soon as ST1-SG
are shorted.
In jog operation mode, the servo motor rotates in the forward rotation direction
while ST1-SG are shorted.
2. In the case of the incremental value command system.
When ST1-SG are shorted in the automatic operation mode, positioning is
executed once on the basis of the position data set to the point table.
In home position return mode, home position return starts as soon as ST1-SG
are shorted.
In jog operation mode, the servo motor rotates in the forward rotation direction
while ST1-SG are shorted.
Forward rotation denotes the direction in which the address is incremented.
3. In absolute value command /incremental value command specifying system
When ST1-SG are shorted in the automatic operation mode, positioning is
executed once on the basis of the position data set to the point table.
In home position return mode, home position return starts as soon as ST1-SG
are shorted.
In jog operation mode, the servo motor rotates in the forward rotation direction
while ST1-SG are shorted.
Reverse rotation start
ST2
CN1B
9
This device is used in the incremental value command system.
When ST2-SG are shorted in the automatic operation mode, positioning is executed
once in the reverse rotation direction on the basis of the position data set to the
point table.
In jog operation mode, the servo motor rotates in the reverse rotation direction
while ST2-SG are shorted.
Reverse rotation denotes the direction in which the address is decremented.
The reverse rotation start (ST2) is also used as the start signal of the function to
perform high-speed positioning to the home position. (Refer to section 4.4.11.)
Automatic/manual
selection
MD0 CN1B
7
Short MD0-SG to choose the automatic operation mode, or open them to choose the
manual operation mode.
When terminals DOG-SG are shorted, the proximity dog signal is detected. The
polarity of dog detection input can be changed with the parameter.
Parameter No.8
Polarity of proximity dog
detection input
0 (initial value)
DOG-SG are opened.
1 DOG-SG
are
shorted.
Proximity dog
DOG
CN1A
8
Summary of Contents for MR-J2S-10CP
Page 11: ...A 10 MEMO ...
Page 19: ...8 MEMO ...
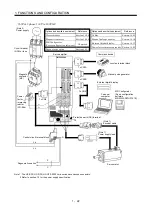
Page 45: ...1 26 1 FUNCTIONS AND CONFIGURATION MEMO ...
Page 181: ...6 20 6 MR Configurator SERVO CONFIGURATION SOFTWARE MEMO ...
Page 207: ...7 26 7 DISPLAY AND OPERATION MEMO ...
Page 219: ...8 12 8 GENERAL GAIN ADJUSTMENT MEMO ...
Page 229: ...9 10 9 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
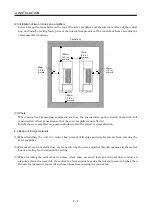
Page 231: ...10 2 10 INSPECTION MEMO ...
Page 249: ...12 8 12 OUTLINE DIMENSION DRAWINGS MEMO ...
Page 257: ...13 8 13 CHARACTERISTICS MEMO ...






































































