





























567
CHAPTER 12 CONTROL SUB FUNCTIONS
12
12.
6 Abs
olut
e Pos
ition
Res
tora
tion
F
unc
tion
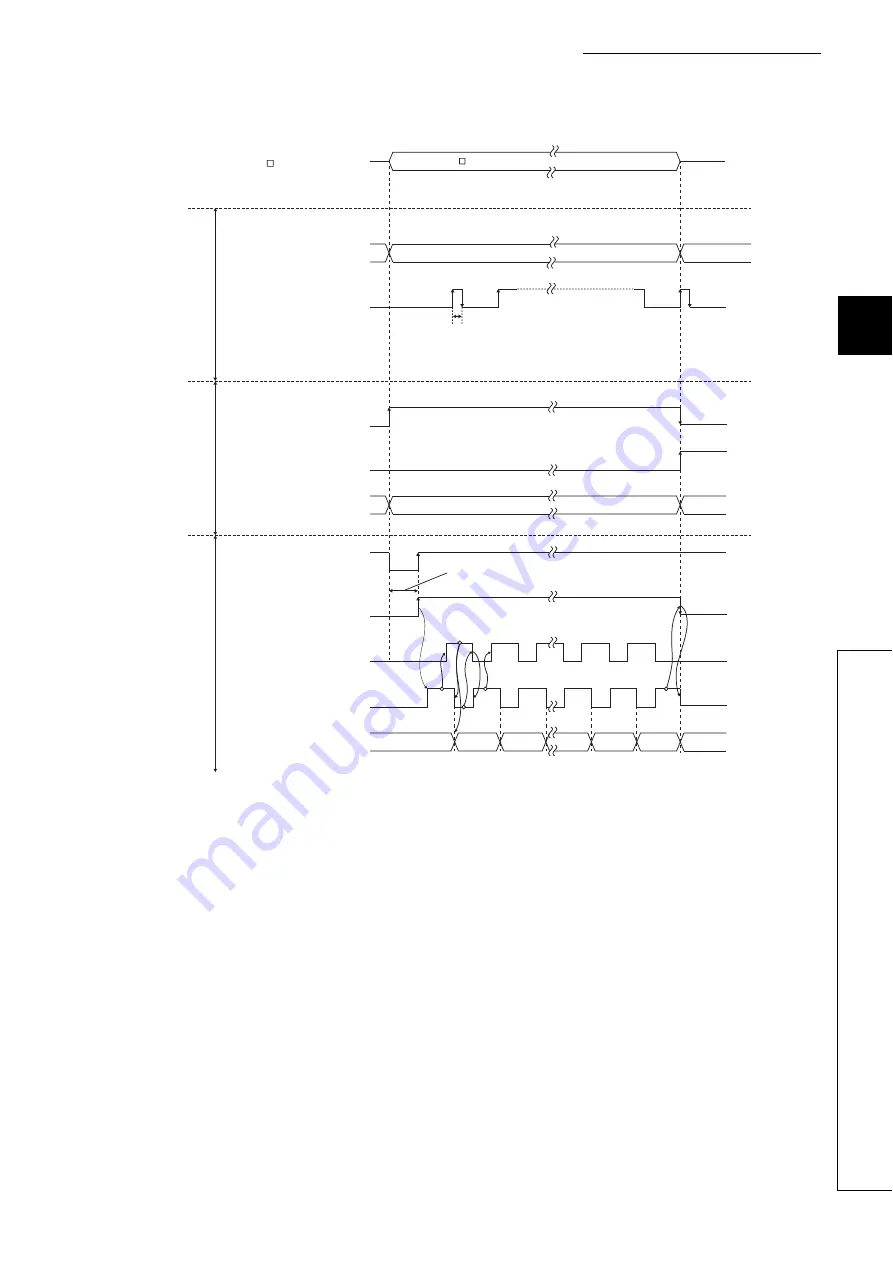
• The following drawing shows an operation when data is transferred to the servo amplifier.
1.
The BUSY signal is turned ON and the axis operation status is set to "Analyzing" by the dedicated
instruction "ABRST
". At this time, the signal is controlled to turn OFF the servo amplifier. The
servo is powered OFF in 60ms + scan time.
2.
When the servo is turned ON, the ABS transfer mode is simultaneously turned ON. After receiving
the ABS transfer mode, detecting the absolute position and calculating the absolute position, the
servo amplifier will turn ON the ABS transmission data ready (ABST) and answer back to LD75
notifying that the send data is ready.
3.
After recognizing that the ABS transmission data ready (ABST) turned ON, LD75 turns ON the ABS
request (ABSR).
4.
The servo amplifier outputs the ABS lower 2 bits and ABS transmission data ready (ABST) OFF by
the ABS request (ABSR).
5.
After recognizing that the ABS transmission data ready (ABST) turned OFF (the ABS2bit data is
output), LD75 reads the lower 2bits of ABS and turns OFF the ABS request (ABSR).
2.
3.
5.
4. 6.
7.
1.
ABRST
S+4 (Status)
D+0 (Complete device)
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Positioning complete
signal
BUSY signal
Axis operation status
Servo ON
(SON)
ABS transfer
mode (ABSM)
ABS request (ABSR)
ABS transmission
data ready (ABST)
Transmission (ABS) data
Statuses of
devices
Statuses of
the LD75
I/O signals
from/to servo
amplifier
"ABRST " is executed continuously until "S+4" becomes 0.
ON for one scan
0
0
Analyzing
ABS transmitting
Lower
2bit
Checksum
higher 2bit
Standby
Values other than 0 (the phase numbers of absolute position restoration) is
stored after the process starts.
Approx. 60ms + scan time
Summary of Contents for MELSEC-L LD75D
Page 2: ......
Page 11: ...9 Memo ...
Page 176: ...174 ...
Page 264: ...262 ...
Page 266: ...264 ...
Page 267: ...265 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 268: ...266 ...
Page 269: ...267 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 270: ...268 ...
Page 271: ...269 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 272: ...270 Z ABRST1 instruction execution ...
Page 273: ...271 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 278: ...276 ...
Page 279: ...277 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 280: ...278 ...
Page 281: ...279 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 282: ...280 ...
Page 283: ...281 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 284: ...282 ...
Page 285: ...283 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 286: ...284 ...
Page 287: ...285 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 316: ...314 Memo ...
Page 685: ...683 APPENDICES A Appendix 1 Function Update Appendix 1 1 Function comparison Memo ...
Page 738: ...736 Memo ...
Page 817: ......







































































