





























350
(d) Changing the speed (
The two modes for changing the speed are shown below.
• Standard switching
Switch the speed when executing the next positioning data.
• Front-loading switching
The speed switches at the end of the positioning data currently being executed.
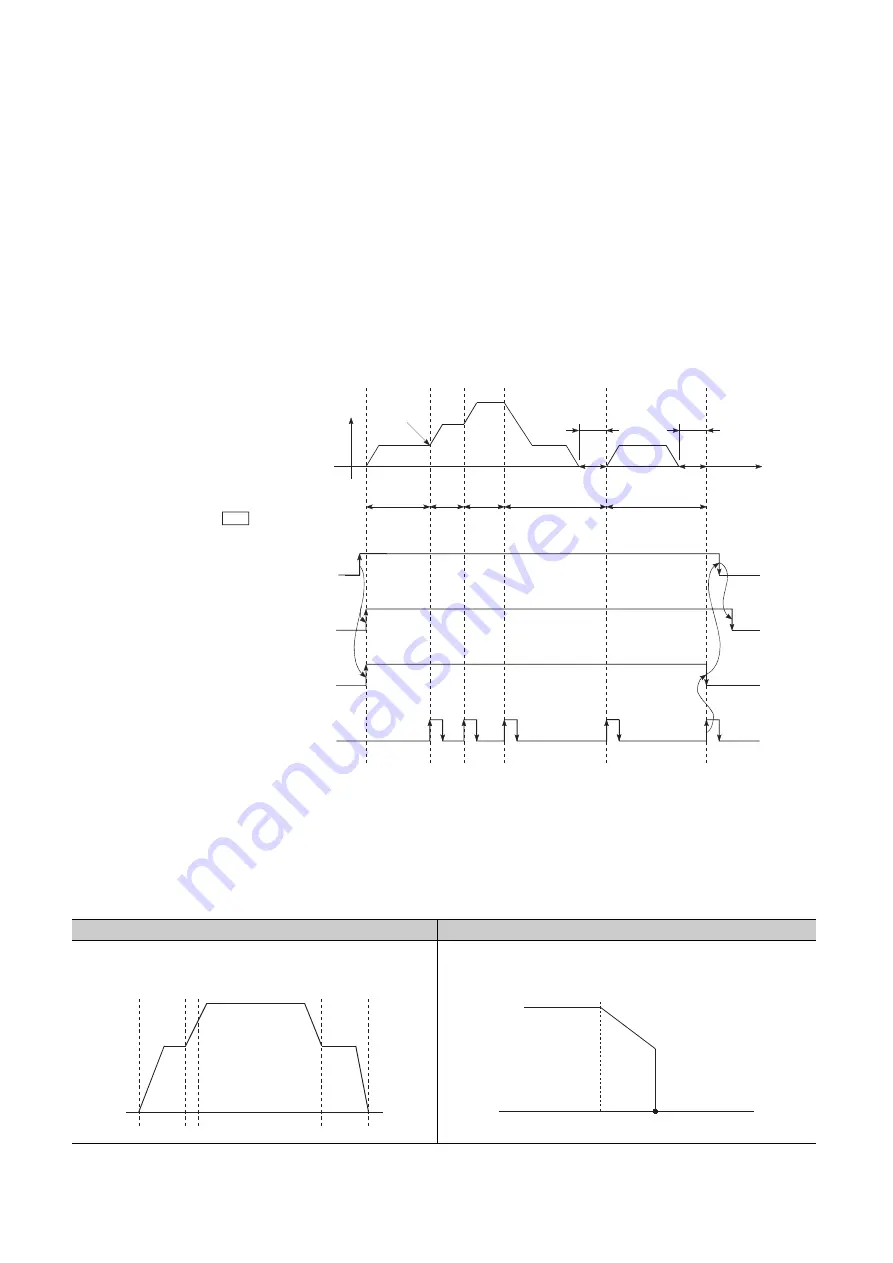
[Standard speed switching mode]
• If the respective command speeds differ in the "positioning data currently being executed" and the
"positioning data to carry out the next operation", the machine will accelerate or decelerate after reaching
the positioning point set in the "positioning data currently being executed" and the speed will change over
to the speed set in the "positioning data to carry out the next operation".
• The parameters used in acceleration/deceleration to the command speed set in the "positioning data to
carry out the next operation" are those of the positioning data to carry out acceleration/deceleration. Speed
switching will not be carried out if the command speeds are the same.
• Speed switching condition
If the movement amount is small in regard to the target speed, the current speed may not reach the target
speed even if acceleration/deceleration is carried out. In this case, the machine is
accelerated/decelerated so that it nears the target speed.
If the movement amount will be exceeded when automatic deceleration is required (Ex. Operation
patterns "00", "01"), the machine will immediately stop at the designated positioning address, and a
warning "Insufficient movement distance" (warning code: 513) will occur.
When the speed cannot be changed over in P2
When the movement amount is small during automatic deceleration
When the relation of the speeds is P1 = P4, P2 = P3, P1 < P2.
The movement amount required to carry out the automatic deceleration cannot
be secured, so the machine immediately stops in a speed
0 status.
OFF
ON
OFF
ON
OFF
ON
OFF
ON
11
11
11
01
00
V
Dwell time
t
Speed
switching
Da. 1 O
peration pattern
Positioning
Start complete signal
BUSY signal
Positioning complete signal
Positioning start signal
[XC, XD, XE, XF]
[X10, X11, X12, X13]
[Y10, Y11, Y12, Y13]
Dwell time
[X14, X15, X16, X17]
P1
P2
P3
P4
Pn
Pn+1
Positioning address
Summary of Contents for MELSEC-L LD75D
Page 2: ......
Page 11: ...9 Memo ...
Page 176: ...174 ...
Page 264: ...262 ...
Page 266: ...264 ...
Page 267: ...265 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 268: ...266 ...
Page 269: ...267 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 270: ...268 ...
Page 271: ...269 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 272: ...270 Z ABRST1 instruction execution ...
Page 273: ...271 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 278: ...276 ...
Page 279: ...277 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 280: ...278 ...
Page 281: ...279 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 282: ...280 ...
Page 283: ...281 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 284: ...282 ...
Page 285: ...283 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 286: ...284 ...
Page 287: ...285 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 316: ...314 Memo ...
Page 685: ...683 APPENDICES A Appendix 1 Function Update Appendix 1 1 Function comparison Memo ...
Page 738: ...736 Memo ...
Page 817: ......







































































