





























127
CHAPTER 5 DATA USED FOR POSITIONING CONTROL
5
5.
2
List
of
P
a
ramet
e
rs
(a) Setting range
*1
1 to 32767: Set as a decimal
32768 to 65535: Convert into hexadecimal and set
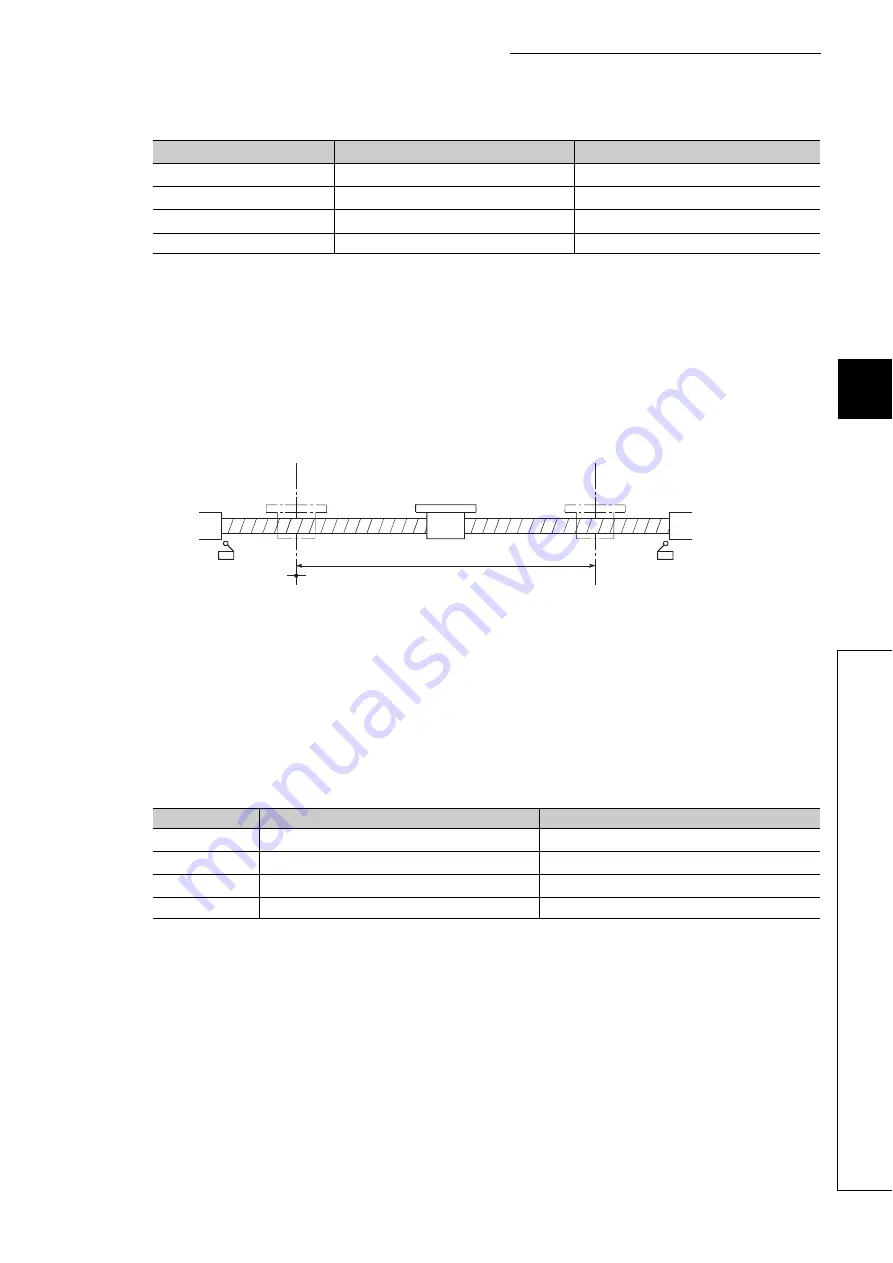
(2) [Pr.12] Software stroke limit upper limit value
Set the upper limit for the machine's movement range during positioning control.
(3) [Pr.13] Software stroke limit lower limit value
Set the lower limit for the machine's movement range during positioning control.
• Generally, the OP is set at the lower limit or upper limit of the stroke limit.
• By setting the upper limit value or lower limit value of the software stroke limit, overrun can be prevented in
the software. However, an emergency stop limit switch must be installed nearby outside the range.
• To invalidate the software stroke limit, set the setting value to "upper limit value = lower limit value". (If it is
within the setting range, the setting value can be anything.)
• When the unit is "degree", the software stroke limit check is invalid during speed control (including speed-
position switching control, position-speed switching control) or during manual control.
(a) Setting range
(4) [Pr.14] Software stroke limit selection
Set whether to apply the software stroke limit on the "current feed value" or the "machine feed value". The
software stroke limit will be validated according to the set value.
(5) [Pr.15] Software stroke limit valid/invalid setting
Set whether to validate the software stroke limit during JOG/Inching operation and manual pulse generator
operation.
[Pr.1] setting value
Value set with GX Works2 (unit)
Value set with program (unit)
0: mm
0 to 6553.5 (
m)
0 to 65535 (
10
-1
m)
1: inch
0 to 0.65535 (inch)
0 to 65535 (
10
-5
inch)
2: degree
0 to 0.65535 (degree)
0 to 65535 (
10
-5
degree)
3: pulse
0 to 65535 (pulse)
0 to 65535 (pulse)
[Pr.1] setting value
Value set with GX Works2 (unit)
Value set with program (unit)
0: mm
-214748364.8 to 214748364.7 (
m)
-2147483648 to 2147483647 (
10
-1
m)
1: inch
-21474.83648 to 21474.83647 (inch)
-2147483648 to 2147483647 (
10
-5
inch)
2: degree
0 to 359.99999 (degree)
0 to 35999999 (
10
-5
degree)
3: pulse
-2147483648 to 2147483647 (pulse)
-2147483648 to 2147483647 (pulse)
Software stroke
limit lower limit
Software stroke
limit upper limit
OP
(Machine movement range)
Emergency stop
limit switch
Emergency stop
limit switch
Summary of Contents for MELSEC-L LD75D
Page 2: ......
Page 11: ...9 Memo ...
Page 176: ...174 ...
Page 264: ...262 ...
Page 266: ...264 ...
Page 267: ...265 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 268: ...266 ...
Page 269: ...267 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 270: ...268 ...
Page 271: ...269 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 272: ...270 Z ABRST1 instruction execution ...
Page 273: ...271 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 278: ...276 ...
Page 279: ...277 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 280: ...278 ...
Page 281: ...279 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 282: ...280 ...
Page 283: ...281 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 284: ...282 ...
Page 285: ...283 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 286: ...284 ...
Page 287: ...285 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 316: ...314 Memo ...
Page 685: ...683 APPENDICES A Appendix 1 Function Update Appendix 1 1 Function comparison Memo ...
Page 738: ...736 Memo ...
Page 817: ......





















































