





























773
APPENDICES
A
Appendix
8
ME
LSE
C
E
xplanat
ion
of
Pos
itioning T
e
rm
s
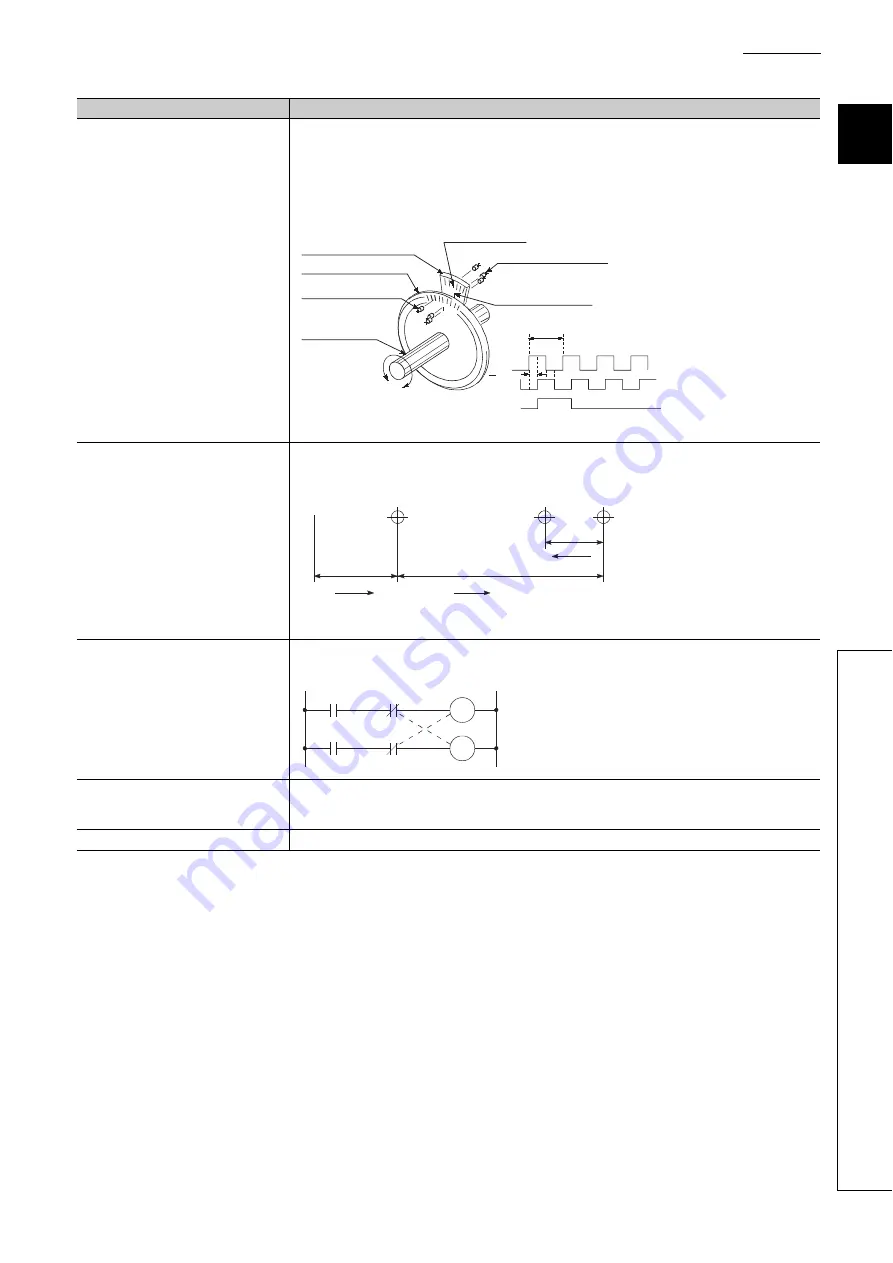
INCREMENTAL ENCODER
A device that simply outputs ON/OFF pulses by the rotation of the axis. 1-phase types output only A pulses, and
do not indicate the axis rotation direction. 2-phase types output both A and B pulse trains, and can judge the
rotation direction. The direction is judged to be forward if the B pulse train turns ON when A is ON, and judged to
be reverse if A turns ON when B is ON. There is also another type of incremental encoder with a zero signal. The
most commonly used incremental encoders output between 100 and 10,000 pulses per axis rotation. Refer to the
term "ENCODER".
INCREMENTAL SYSTEM
The current value is 0 in this system. Positions are expressed by the designated direction and distance of travel.
Also called the relative address system. This system is used in fixed-feed, etc. Compare ABSOLUTE SYSTEM.
INTERLOCK
In this condition, the machine is blocked from moving to the next operation until the operation in progress is
complete. This function is used to prevent damage to devices and malfunctioning.
INVERTER
This refers to a device to change a direct current (DC) to an alternating current (AC). The device actually
changes the motor speed by changing 50Hz or 60Hz of commercial frequency to direct current once, then
changing it again to a 5 to 120Hz alternating current and controlling the motor speed.
ERROR RESET
This resets error of axis. Note that if the cause of the error is not eliminated at that time, the error will occur again.
Term
Description
A
B
A
B
Z
1
4
A signal slit
B signal slit
Lighting emitting diode
Zero signal slit
2-phase + OP output
1 pulse per axis rotation
Output waveform
Zero signal
Rotating axis
Phototransistor
Slit disk
1 pitch
pitch
3
.
o
N
2
.
o
N
1
.
o
N
0
0
0
Stop
Left
Right
Right No. 2 is several millimeters
to the right of No. 1.
Y1
Y0
Y0
Y1
Forward run
Reverse run
Summary of Contents for MELSEC-L LD75D
Page 2: ......
Page 11: ...9 Memo ...
Page 176: ...174 ...
Page 264: ...262 ...
Page 266: ...264 ...
Page 267: ...265 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 268: ...266 ...
Page 269: ...267 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 270: ...268 ...
Page 271: ...269 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 272: ...270 Z ABRST1 instruction execution ...
Page 273: ...271 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 278: ...276 ...
Page 279: ...277 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 280: ...278 ...
Page 281: ...279 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 282: ...280 ...
Page 283: ...281 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 284: ...282 ...
Page 285: ...283 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 286: ...284 ...
Page 287: ...285 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 316: ...314 Memo ...
Page 685: ...683 APPENDICES A Appendix 1 Function Update Appendix 1 1 Function comparison Memo ...
Page 738: ...736 Memo ...
Page 817: ......





















































