





























66
3 MAJOR POSITIONING CONTROL
3.1 Overview of the Major Positioning Controls
■
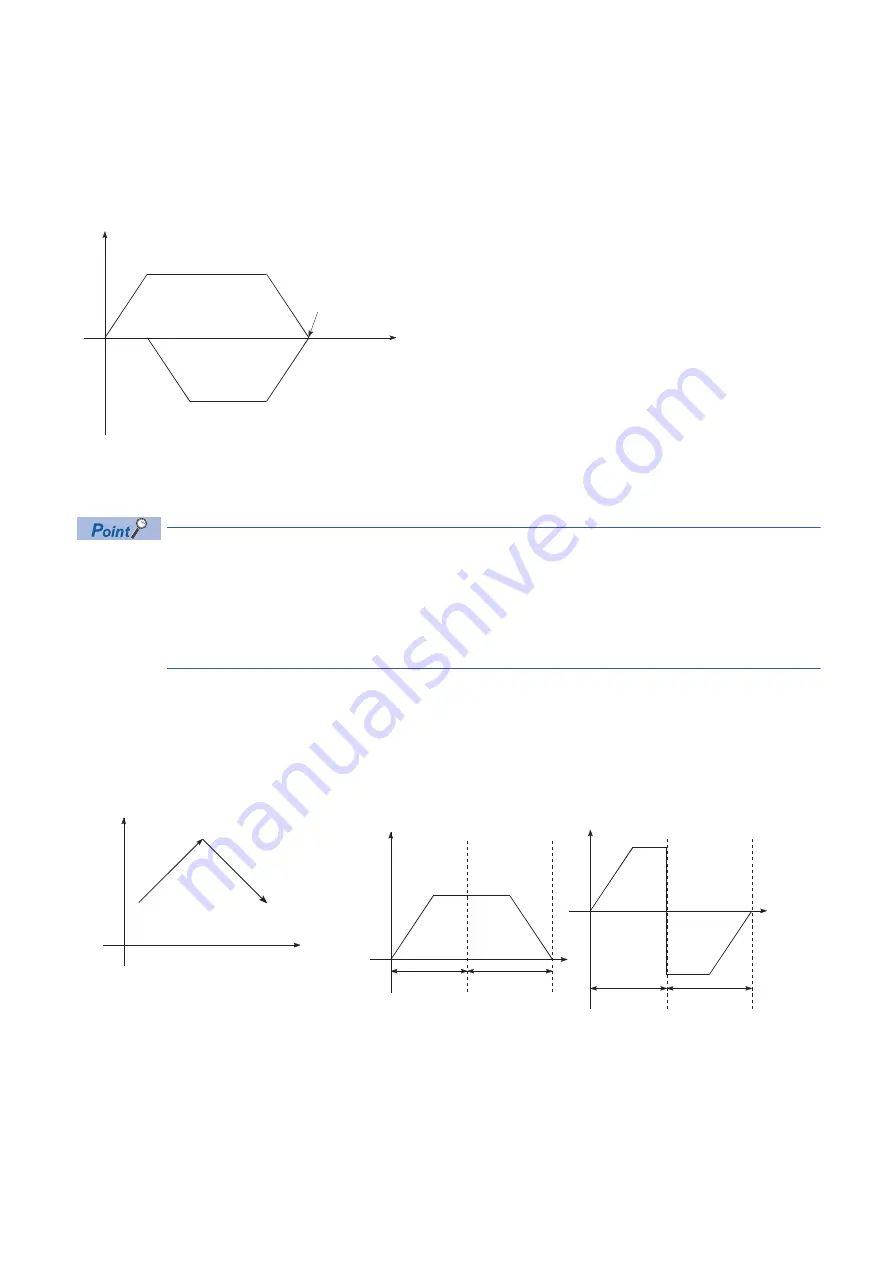
Conditions of deceleration stop during the continuous path control
The deceleration stop is not performed in the continuous path control. However, in the following three cases, the deceleration
stop is performed and the speed becomes 0 once.
• When the operation pattern of the positioning data currently being executed is Continuous path control: 11 and the
movement direction of the positioning data currently being executed differs from that of the next positioning data. (Only for
the positioning control of one axis. (Refer to Point.))
• During the operation with the step operation (
• When an error exists in the next positioning data, the positioning may stop immediately depending on an error. (
• In the positioning data of the continuous path control, the command speed becomes 0 for about 0.88ms
when [Da.6] Positioning address/movement amount is set to 0. If [Da.6] Positioning address/movement
amount is set to 0 to increase the number of speed change points in the future, change the setting of [Da.2]
Control method to NOP instruction not to execute the positioning data No. (
• In the positioning data of the continuous path control, ensure the movement amount so that the execution
time of the data becomes 100ms or longer, or reduce the command speed.
■
Operation for sudden direction reversal
• The movement direction is not checked during the interpolation control. Thus, the deceleration stop is not performed even if
the movement direction is changed. Therefore, the interpolation axis may suddenly reverse its direction. To avoid the
sudden direction reversal, set Continuous positioning control: 01 for the positioning data at the passing point instead of
Continuous path control: 11.
V
Positioning data No.1
Operation pattern: 11
Positioning data No.2
Operation pattern: 00
The speed becomes 0.
V
t
V
t
Positioning by interpolation
Reference axis operation
Partner axis
Positioning
data No.1
Reference axis
Positioning
data No.2
Positioning data No.1
⋅ ⋅ ⋅
Continuous path control
Positioning
data No.1
Positioning
data No.2
Positioning
data No.1
Positioning
data No.2
Partner axis operation
Summary of Contents for MELSEC iQ-R RD75P4
Page 1: ...MELSEC iQ R Positioning Module User s Manual Application RD75P2 RD75P4 RD75D2 RD75D4 ...
Page 2: ......
Page 13: ...11 MEMO ...
Page 19: ...17 CONTENTS INDEX 588 REVISIONS 592 WARRANTY 593 TRADEMARKS 594 ...
Page 498: ...496 13 PROGRAMMING 13 2 List of Labels Used ...
Page 503: ...13 PROGRAMMING 13 4 Program Example 501 13 ...
Page 514: ...512 13 PROGRAMMING 13 4 Program Example Restart program Parameter data initialization program ...
Page 515: ...13 PROGRAMMING 13 4 Program Example 513 13 Flash ROM write program Error reset program ...
Page 516: ...514 13 PROGRAMMING 13 4 Program Example Stop program ...
Page 565: ...APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted 563 A ...
Page 597: ......







































































