





























CHAPTER 12 POSITIONING DATA
12-12
Settings
12
12.2.2 Immediate Value Data Specifications
After immediate value data are set by the RS-485 communications, when the start positioning
signal is set, positioning is started according to the setting.
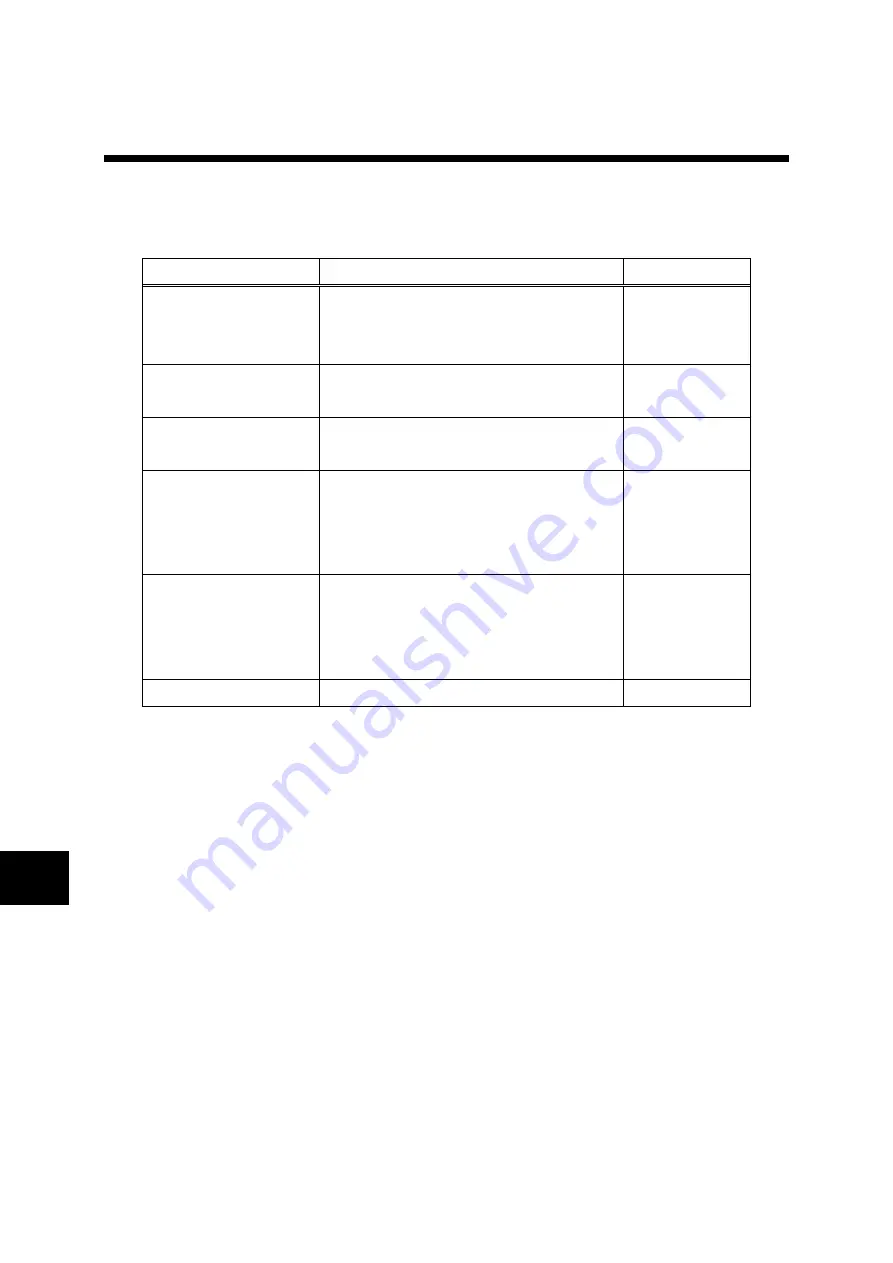
The content of immediate value data is as follows:
Item
Setting range
Default value
Status (ABS/INC)
ABS, INC, and M code enable/disable
M code output during positioning/after
positioning completion
INC and M code
disable
Position (stop position)
-2000000000 to +2000000000 [unit
amount] (in increments of 1)
0
Speed (rotation speed)
0.01 to max. rotation speed [r/min] (in
increments of 0.01)
0.01
Acceleration time
0.0-99999.9 [ms] (in increments of 0.1)
However, when 0.0 is set, the amplifier
follows the acceleration time 1 (PA1_37) or
2 (PA1_39) (Note 1) selected by ACC0.
0.0
Deceleration time
0.0-99999.9 [ms] (in increments of 0.1)
However, when 0.0 is set, the amplifier
follows the deceleration time 1 (PA1_38) or
2 (PA1_40) (Note 1) selected by ACC0.
0.0
M code
0 to 0xFF
0xFF(Note 2)
Note 1: If ACC0 (setting 14) is not assigned to the CONT signal, the motor follows acceleration
time 1 (PA1_37) and deceleration time 1 (PA1_38), respectively.
Note 2: The OUT signals (MD0 to MD7) of the M code follow the selection of output when
PA2_43: output when M code off.
Immediate value data are different from positioning data in the continuing function of status
setting (CO and CEND) and setting of the stand still timer.
For details of each data, refer to sections 12.2.1.1 to 12.2.1.5.
Summary of Contents for ALPHA7
Page 1: ......
Page 3: ...ii...
Page 22: ...0 1 CHAPTER 0 INTRODUCTION 0...
Page 36: ...1 1 CHAPTER 1 INSTALLATION 1...
Page 47: ...CHAPTER 1 INSTALLATION 1 12 Servo Amplifier 1...
Page 48: ...2 1 CHAPTER 2 WIRING 2...
Page 163: ...CHAPTER 2 WIRING 2 116 Safety Function 2...
Page 164: ...3 1 CHAPTER 3 OPERATION 3...
Page 192: ...4 1 CHAPTER 4 PARAMETER 4...
Page 317: ...CHAPTER 4 PARAMETER 4 126 Extension Function 2 Setting Parameters 4...
Page 318: ...5 1 CHAPTER 5 SERVO ADJUSTMENT 5...
Page 353: ...CHAPTER 5 SERVO ADJUSTMENT 5 36 Special Adjustment Vibration Suppression 5...
Page 354: ...6 1 CHAPTER 6 KEYPAD 6...
Page 408: ...7 1 CHAPTER 7 MAINTENANCE AND INSPECTION 7...
Page 434: ...8 1 CHAPTER 8 SPECIFICATIONS 8...
Page 460: ...9 1 CHAPTER 9 CHARACTERISTICS 9...
Page 472: ...10 1 CHAPTER 10 PERIPHERAL EQUIPMENT 10...
Page 516: ...11 1 CHAPTER 11 ABSOLUTE POSITION SYSTEM 11...
Page 523: ...CHAPTER 11 ABSOLUTE POSITION SYSTEM 11 8 Calculation of Battery Life 11...
Page 524: ...12 1 CHAPTER 12 POSITIONING DATA 12...
Page 540: ...13 1 CHAPTER 13 MODBUS RTU COMMUNICATION 13...
Page 579: ...CHAPTER 13 MODBUS RTU COMMUNICATION 13 40 Communications Procedures 13...
Page 580: ...14 1 CHAPTER 14 PC LOADER 14...
Page 614: ...STANDARDS COMPLIANCE CHAPTER 15 15...
Page 628: ...CHAPTER 16 APPENDIXES 16...
Page 661: ...CHAPTER 16 APPENDIXES 34 Product Warranty 16 16 7 Product Warranty...
Page 662: ......





















































