





























6 Vector Control and Applied Functions
6 - 34
Multi-function Compact Inverter 3G3MX2-V1 User’s Manual (I585-E1)
z
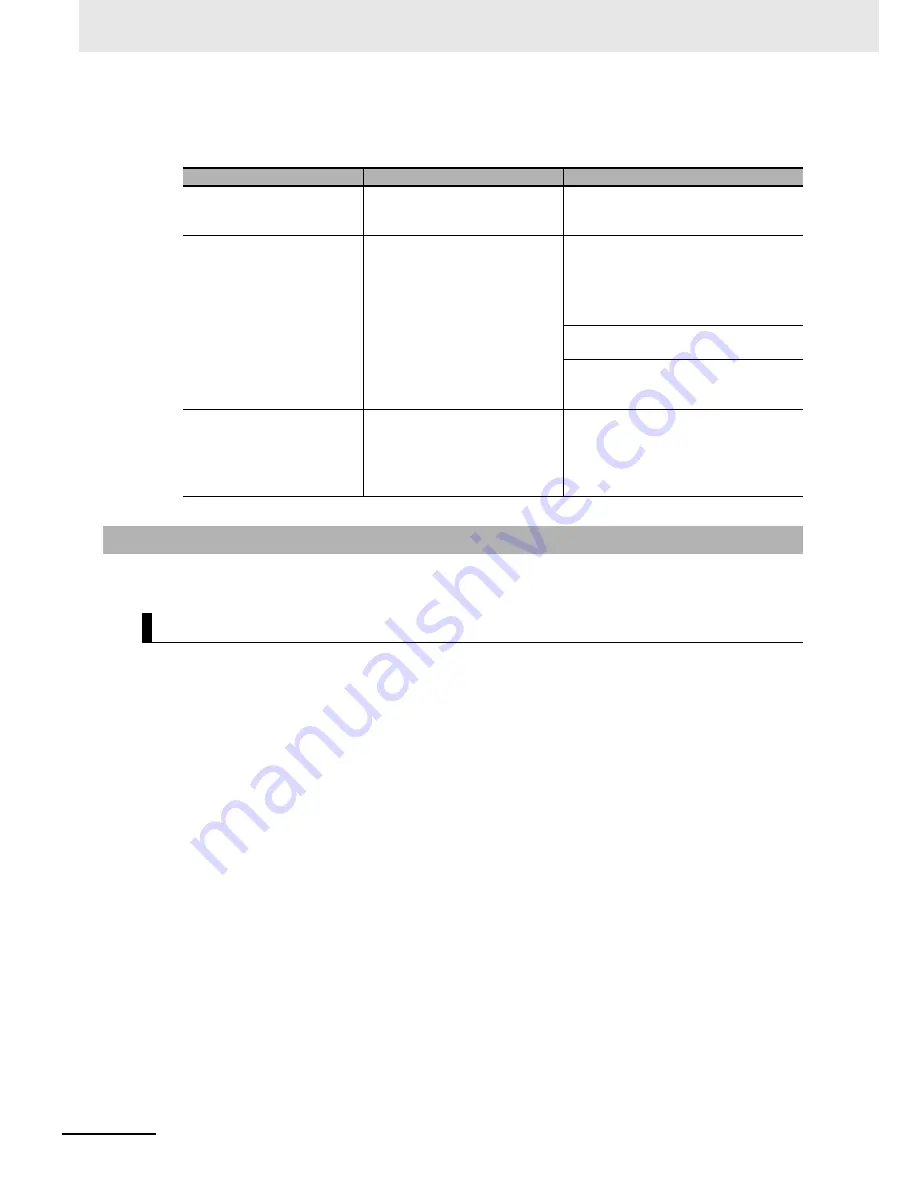
If problem occurs during wiring check
If any problem occurs during the wiring check, refer to the following table to take corrective action.
The operation and settings of the simple position control function are described below.
The simple position control is performed based on the following three settings after the RUN command
turns ON.
When the motor reaches the target position, the inverter outputs the positioning completion signal to
stop the motor by applying DC injection braking.
(1) Simple position control starts when the RUN command (forward or reverse) turns
ON.
(2) The inverter judges the direction of movement based on the current position and the
target position, regardless of the RUN command.
(3) The inverter accelerates according to the acceleration and deceleration time settings
to reach the target speed.
If the amount of movement to the target position is small, the inverter decelerates before
the target speed is reached and makes a triangular movement.
Or, if the current position is within the range set in the Positioning Completion Range Set-
ting (P017), the inverter switches to the DC injection braking mode at that position.
Problem
Cause
Check/Remedy
The motor/encoder rotates in
opposite directions during for-
ward and reverse rotations.
The motor/encoder wiring for for-
ward or reverse rotation is con-
nected the other way around.
Reverse the wiring for the phase-A and
phase-B signals.
The Current Position Monitor
(d030) value does not
increase/decrease.
The phase-A or phase-B signal,
or both, is not input correctly.
Check the phase-A and phase-B signals
with a tester etc.
• Are they connected correctly?
• Is the power supplied?
• Is there any disconnected cable?
Check if the encoder’s output circuit is
not damaged.
If the voltage waveform of the encoder is
normal, the inverter’s input circuit is
damaged. (Ask for repair.)
The Current Position Monitor
(d030) value does not
increase/decrease during
either forward or rotation.
The inverter cannot recognize the
rotation direction due to the
effects of crosstalk on the
encoder signal.
Take the following measures:
• Use a complementary-output type
encoder.
• Use a shielded cable and connect it to
the terminal SC.
6-7-3
Simple Position Control Operation and Settings
Simple Position Control Operation
Target position
: The motor moves to the target based on the Multi-step Position
Command 0 to 7 (P060 to P067) settings.
Target speed
: The motor moves according to the frequency reference setting.
Acceleration/Deceleration time : The motor runs according to the acceleration and deceleration
time settings.
Содержание SYSDRIVE MX2 SERIES
Страница 1: ...Multi function Compact Inverter MX2 Series Type V1 User s Manual I585 E1 01 3G3MX2 A V1 ...
Страница 32: ...CONTENTS 29 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 ...
Страница 108: ...2 Design 2 48 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 ...
Страница 176: ...4 Parameter List 4 42 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 ...
Страница 310: ...6 Vector Control and Applied Functions 6 68 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 ...
Страница 516: ...9 Overview of DriveProgramming 9 4 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 ...
Страница 538: ...10 Troubleshooting 10 22 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 ...
Страница 598: ...12 Options 12 50 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 ...
Страница 614: ...Appendices A 16 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 ...
Страница 615: ...I 1 Multi function Compact Inverter 3G3MX2 V1 User s Manual I585 E1 I Index ...





















































