





























APP - 15
APPENDICES
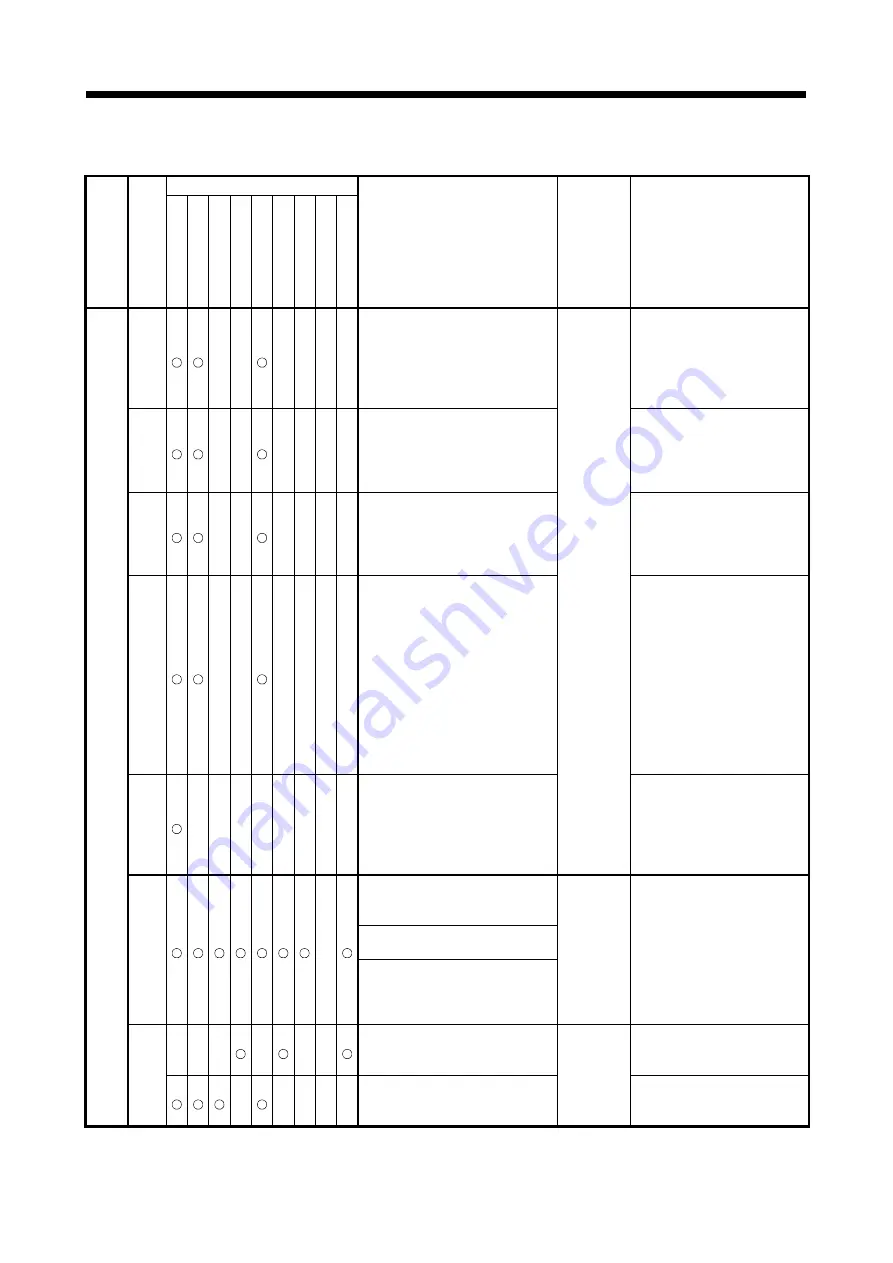
Table 1.2 Drive module error (100 to 1199) list (Continued)
Control mode of virtual servo axis
Error
class
Error
code
Positi
oni
ng
Fixed-
pitc
h fe
ed
Speed
Speed
swi
tchi
ng
Const
ant-
spee
d
JOG
Manua
l pu
lse
gen
erat
or
Synch
rono
us e
nco
der
Positi
on f
ollo
w-u
p
Error cause
Error
processing
Corrective action
260
• The target position change request
(CHGP) specifying the address
where the target position is outside
the range of 0 to 35999999 is
executed to the axis whose unit is
[degree].
• When executing the target
position change request
specifying the address to the
axis whose unit is [degree], set
the target position within the
range of 0 to 35999999.
261
• At the target position change
request (CHGP), since the travel to
the target position after the change
was shorter than the deceleration
distance, an overrun occurred.
• Set the speed so that an
overrun will not occur.
•Set the target position so that an
overrun will not occur.
262
• At the target position change
request (CHGP), the target position
after the change exceeds the range
of the stroke limit.
• Set the stroke limit range or the
target position after the change
so that the positioning control is
performed within the stroke limit
range.
263
• The target position change request
(CHGP) is executed to the program
where the following
acceleration/deceleration system is
set.
(1) FIN acceleration/deceleration
(2) Advanced S-curve acceleration/
deceleration
• Do not execute the target
position change to the program
where the FIN
acceleration/deceleration or the
advanced S-curve
acceleration/deceleration is set.
• Set the
acceleration/deceleration
system of the parameter block
or the servo program to the
trapezoid/S-curve
acceleration/deceleration.
264
• In reference axis-specified linear
interpolation or the long axis-
specified linear interpolation, the
travel of the reference axis or the
long axis after the target position
change request (CHGP) is 0.
Deceleration
stop
• Set a target position so that the
travel of the reference axis or
the long axis after the target
position change is not 0.
• The current value was changed
during positioning control of the
applicable axis.
• The current value was changed for
the axis that had not been started.
300
• The current value was changed for
the servo OFF axis.
Current
value is not
changed.
• Use the following devices as
interlocks not to change the
current value for the applicable
axis.
(1) The start accept flag (M2001
to M2032) OFF for
applicable axis.
(2) The servo READY signal
(M2415+20n) ON.
• The speed after speed change is
set outside the range of 0 to speed
limit value.
• Set the speed after speed
change within the range of 0 to
speed limit value.
Minor
error
305
• The absolute value of speed after
speed change is set outside the
range of 0 to speed limit value.
Control with
the speed
limit value.
• Set the absolute value of speed
after speed change within the
range of 0 to speed limit value.
Содержание Q Series
Страница 1: ......
Страница 19: ...A 18 MEMO ...
Страница 129: ...4 90 4 POSITIONING DEDICATED SIGNALS MEMO ...
Страница 134: ...5 5 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Страница 139: ...5 10 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Страница 163: ...6 24 6 DRIVE MODULE MEMO ...
Страница 201: ...7 38 7 TRANSMISSION MODULE MEMO ...
Страница 257: ...9 12 9 REAL MODE VIRTUAL MODE SWITCHING AND STOP RE START MEMO ...
Страница 267: ...10 10 10 AUXILIARY AND APPLIED FUNCTIONS MEMO ...
Страница 352: ......







































































