





























APP - 12
APPENDICES
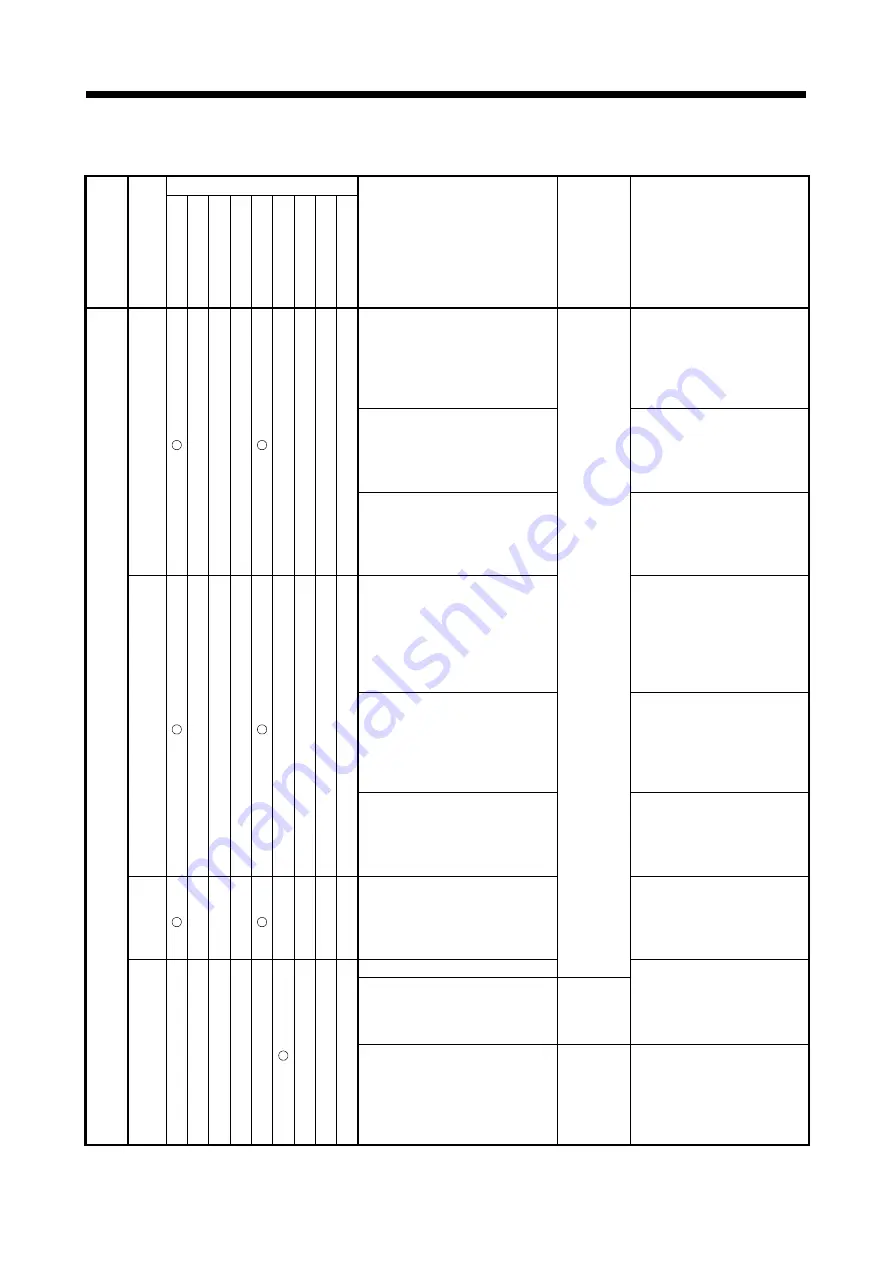
Table 1.2 Drive module error (100 to 1199) list (Continued)
Control mode of virtual servo axis
Error
class
Error
code
Positi
oni
ng
Fixed-
pitc
h fe
ed
Speed
Speed
swi
tchi
ng
Const
ant-
spee
d
JOG
Manua
l pu
lse
gen
erat
or
Synch
rono
us e
nco
der
Positi
on f
ollo
w-u
p
Error cause
Error
processing
Corrective action
• The address that does not generate
an arc is set at R(radius) specified
circular interpolation or R(radius)
specified helical interpolation.
(Relationship between the start
point, radius and end point.)
• Correct the addresses of the
servo program.
• The radius-specified circular
interpolation or radius-specified
helical interpolation was started in
the control unit degree axis which is
"stroke limit invalid".
• Make the stroke limit valid for
the control unit degree axis
starts the radius-specified
circular interpolation or radius-
specified helical interpolation.
108
(Note)
• The radius-specified circular
interpolation or radius-specified
helical interpolation was started in
the axis which is "stroke limit
invalid".
• Make the stroke limit valid for
the axis starts the radius-
specified circular interpolation or
radius-specified helical
interpolation.
• The address that does not generate
an arc is set at central point-
specified circular interpolation or
central point-specified helical
interpolation.
(Relationship between the start
point, central point and end point.)
• Correct the addresses of the
servo program.
• The central point-specified circular
interpolation or central point-
specified helical interpolation was
started in the control unit degree
axis which is "stroke limit invalid".
• Make the stroke limit valid for
the control unit degree axis
starts the central point-specified
circular interpolation or central
point-specified helical
interpolation.
109
(Note)
• The central point-specified circular
interpolation or central point-
specified helical interpolation was
started in the axis which is "stroke
limit invalid".
• Make the stroke limit valid for
the axis starts the central point-
specified circular interpolation or
central point-specified helical
interpolation.
110
(Note)
• The difference between the end
point address and ideal end point is
outside the allowable error range for
circular interpolation at the circular
interpolation.
• Correct the addresses of the
servo program.
• The setting JOG speed is "0".
Positioning
control does
not start.
• The setting JOG speed exceeded
the JOG speed limit value.
Control with
the JOG
speed limit
value.
• Set the correct speed (within the
setting range).
Minor
error
116
• The setting JOG speed limit value
exceeded the setting range.
Control with
the
maximum
setting range
of each
control unit.
• Set the correct JOG speed limit
value (within the setting range).
(Note): This error code is stored at all relevant interpolation axis storage areas at the interpolation operation.
Содержание Q Series
Страница 1: ......
Страница 19: ...A 18 MEMO ...
Страница 129: ...4 90 4 POSITIONING DEDICATED SIGNALS MEMO ...
Страница 134: ...5 5 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Страница 139: ...5 10 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Страница 163: ...6 24 6 DRIVE MODULE MEMO ...
Страница 201: ...7 38 7 TRANSMISSION MODULE MEMO ...
Страница 257: ...9 12 9 REAL MODE VIRTUAL MODE SWITCHING AND STOP RE START MEMO ...
Страница 267: ...10 10 10 AUXILIARY AND APPLIED FUNCTIONS MEMO ...
Страница 352: ......







































































