





























APP - 13
APPENDICES
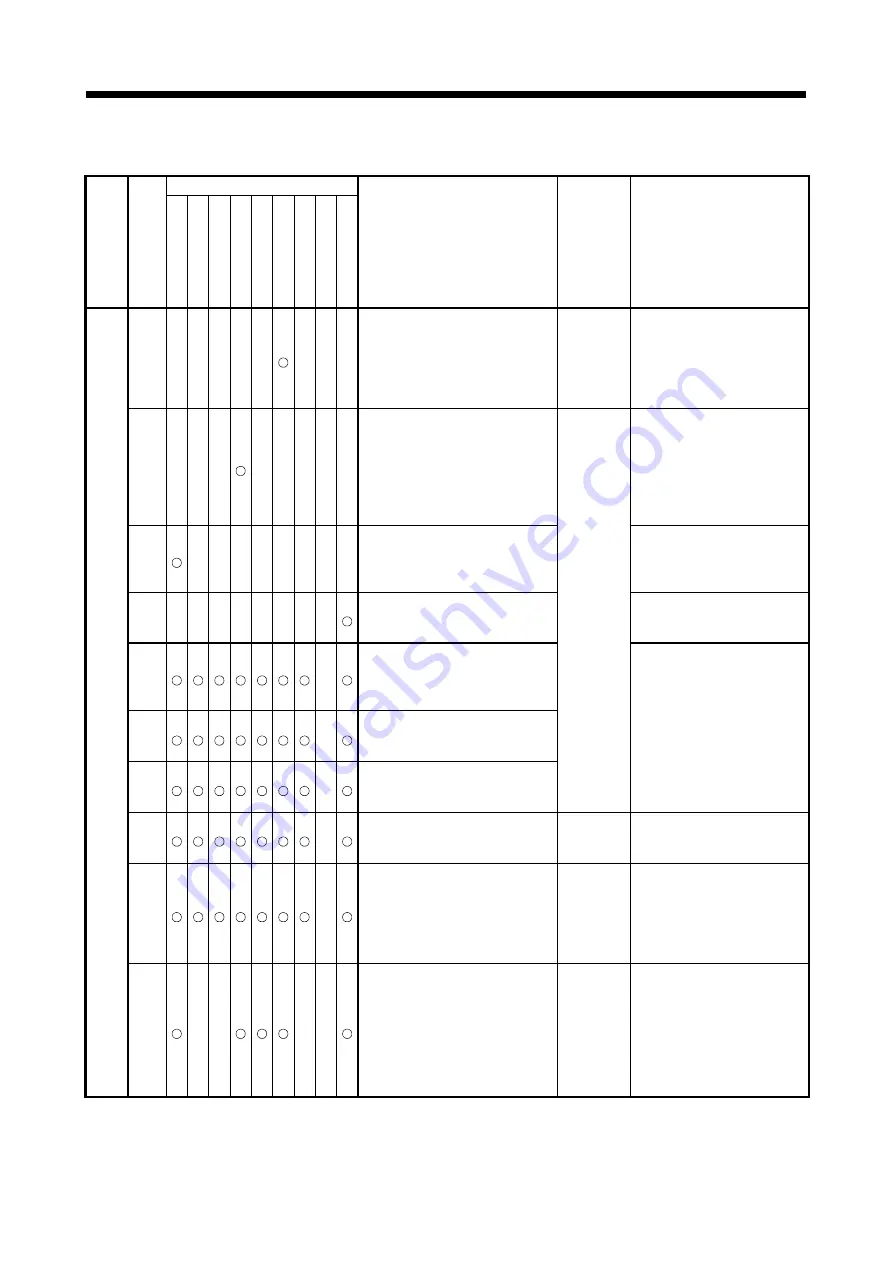
Table 1.2 Drive module error (100 to 1199) list (Continued)
Control mode of virtual servo axis
Error
class
Error
code
Positi
oni
ng
Fixed-
pitc
h fe
ed
Speed
Speed
swi
tchi
ng
Const
ant-
spee
d
JOG
Manua
l pu
lse
gen
erat
or
Synch
rono
us e
nco
der
Positi
on f
ollo
w-u
p
Error cause
Error
processing
Corrective action
117
• Both of forward and reverse rotation
were set at the simultaneous start
for the JOG operation.
Only the
applicable
axis set to
the forward
direction
starts.
• Set a correct data.
119
• In the real mode or at the real mode
axis, the instruction to specify the
end point address by absolute data
method in speed switching control
was executed for the axis with unit
[PLS/mm/inch] where the stroke
limit is disabled.
• When specifying the end point
address by absolute data
method in speed switching
control, make the stroke limit
valid.
140
• The travel value of the reference
axis is set at "0" in the linear
interpolation for reference axis
specification.
• Do not set axis of travel value
"0" as the reference axis.
141
• The position command device of
position follow-up control is set the
odd number.
• Set the even number for the
position command device of
position follow-up control.
151
• Not allowed axis started in the
virtual mode. (It cannot be started
with error at real mode/virtual mode
switching.)
152
• It started at the virtual mode and
during deceleration by all axes
servo OFF (M2042 OFF).
153
• It started at the virtual mode and
during deceleration by occurrence
of the output module servo error.
Positioning
control does
not start.
• Start in the virtual mode again
after correct the error cause in
the real mode.
200
• The PLC ready flag (M2000) turned
off during the control by the servo
program.
Deceleration
stop
• Turn the PLC ready flag
(M2000) on after all axes have
stopped.
204
• The PLC ready flag (M2000) turned
off to on again during deceleration
by turning off the PLC ready flag
(M2000).
No operation
• Turn the PLC ready flag
(M2000) off to on after all axes
have stopped.
(Turn the PLC ready flag
(M2000) off to on during
deceleration is "no operation".)
Minor
error
207
• The feed current value exceeded
the stroke limit range during
positioning control. Only the axis
exceed the stroke limit range is
stored at the circular/helical
interpolation.
All interpolation axes are stored in
the linear interpolation.
Deceleration
stop
• Correct the stroke limit range or
travel value setting so that
positioning control is within the
range of the stroke limit.
Содержание Q Series
Страница 1: ......
Страница 19: ...A 18 MEMO ...
Страница 129: ...4 90 4 POSITIONING DEDICATED SIGNALS MEMO ...
Страница 134: ...5 5 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Страница 139: ...5 10 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Страница 163: ...6 24 6 DRIVE MODULE MEMO ...
Страница 201: ...7 38 7 TRANSMISSION MODULE MEMO ...
Страница 257: ...9 12 9 REAL MODE VIRTUAL MODE SWITCHING AND STOP RE START MEMO ...
Страница 267: ...10 10 10 AUXILIARY AND APPLIED FUNCTIONS MEMO ...
Страница 352: ......







































































