





























APP - 59
APPENDICES
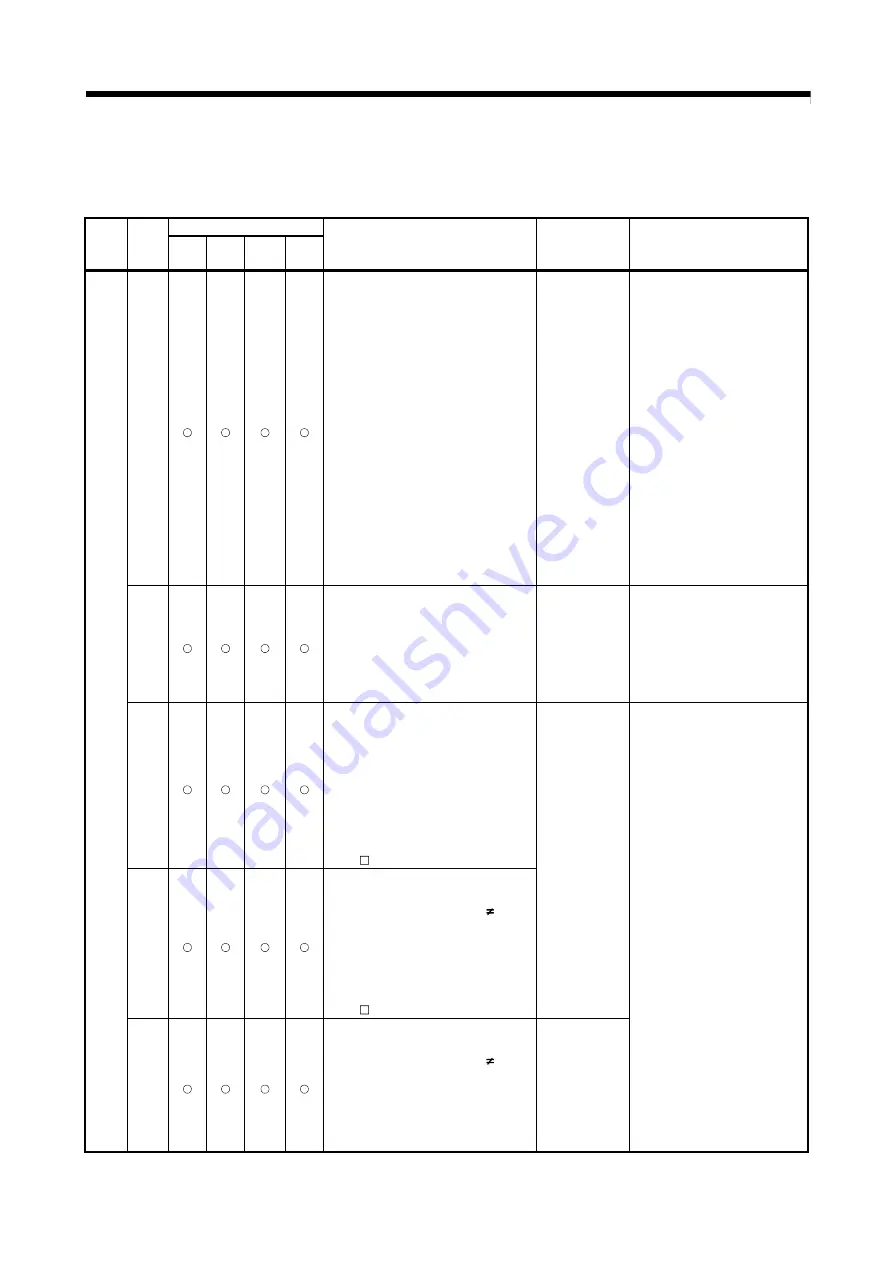
(6) Errors when using an absolute position system (12000 to 12990)
Table 1.21 Output Module Error List (12000 to 12990)
Output module
Error
class
Error
code Roller
Ball
screw
Rotary
table
Cam
Error cause
Processing
Corrective action
12010
• The error causes why the home
position return is required in the
absolute position system are as
follows:
(1) The home position return has
never been executed after the
system start.
(2) The home position return is started,
but not completed correctly.
(3) Absolute data in the Motion CPU is
erased due to causes such as a
battery error.
(4) Servo error [2025], [2143], or
[2913] occurred.
(5) Major error [1202], [1203], [1204],
[12020], [12030] or [12040]
occurred.
(6) "Rotation direction selection" of the
servo parameter is changed.
Home position
return signal
turns ON.
• Execute the home position
return in real mode after
checking the batteries of the
Motion CPU module and servo
amplifier.
12020
• A communication error between the
servo amplifier and encoder occurred
at the servo amplifier power supply on.
Depending on
the version of
operating system
and servo
amplifier, home
position return
signal turns ON.
• Check the motor and encoder
cables.
• If the home position return
request signal is turning ON,
execute a home position return
in the real mode.
12030
• The amount of change in encoder
current value during operation holds
the following expression:
"Amount of change in encoder current
value / 3.5[ms] >180° of motor
revolution"
It is always checked after the servo
amplifier power supply on (in both
servo ON and OFF states).
(Q17 DCPU(-S1) use)
12040
• During operation, the following
expression holds:
"Encoder current value [PLS]
feedback current value [PLS] (number
of bits in encoder enable range)".
It is always checked after the servo
amplifier power supply on (in both
servo ON and OFF states).
(Q17 DCPU(-S1) use)
Home position
return signal
turns ON.
Major
error
12050
• During operation, the following
expression holds:
"Encoder current value [PLS]
feedback current value [PLS] (number
of bits in encoder enable range)".
It is always checked after the servo
amplifier power supply on (in both
servo ON and OFF states).
Operation
continues.
(Home position
return signal
does not turn
ON.)
• Check the motor and encoder
cables.
Содержание Q Series
Страница 1: ......
Страница 19: ...A 18 MEMO ...
Страница 129: ...4 90 4 POSITIONING DEDICATED SIGNALS MEMO ...
Страница 134: ...5 5 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Страница 139: ...5 10 5 MECHANICAL SYSTEM PROGRAM MEMO ...
Страница 163: ...6 24 6 DRIVE MODULE MEMO ...
Страница 201: ...7 38 7 TRANSMISSION MODULE MEMO ...
Страница 257: ...9 12 9 REAL MODE VIRTUAL MODE SWITCHING AND STOP RE START MEMO ...
Страница 267: ...10 10 10 AUXILIARY AND APPLIED FUNCTIONS MEMO ...
Страница 352: ......







































































