





























3. Installation and Wiring
3-24
3.4.3 Wiring the control circuit terminal
①
Shield wire or vinyl insulated wire are highly recommended to be used for
the control circuit terminal.
②
Be sure to use twisted shield wire if wiring distance gets too long.
③
Wire should be at least as thick as 0.2 ~ 0.8 mm
2
(18 ~ 26 AWG).
④
Screwing torque limit should be kept under 5.2 lb-in.
⑤
Maximum interrupting capacity of auxiliary contact 1, 2 is of AC 250V/1A, DC
30V/1A.
⑥
Maximum interrupting capacity of fault alarm relay A, B contact is of AC
250V/1A, DC 30V/1A.
⑦
Open collector output 1, 2, 3 and encoder output can be used below
maximum of 24V/100mA.
⑧
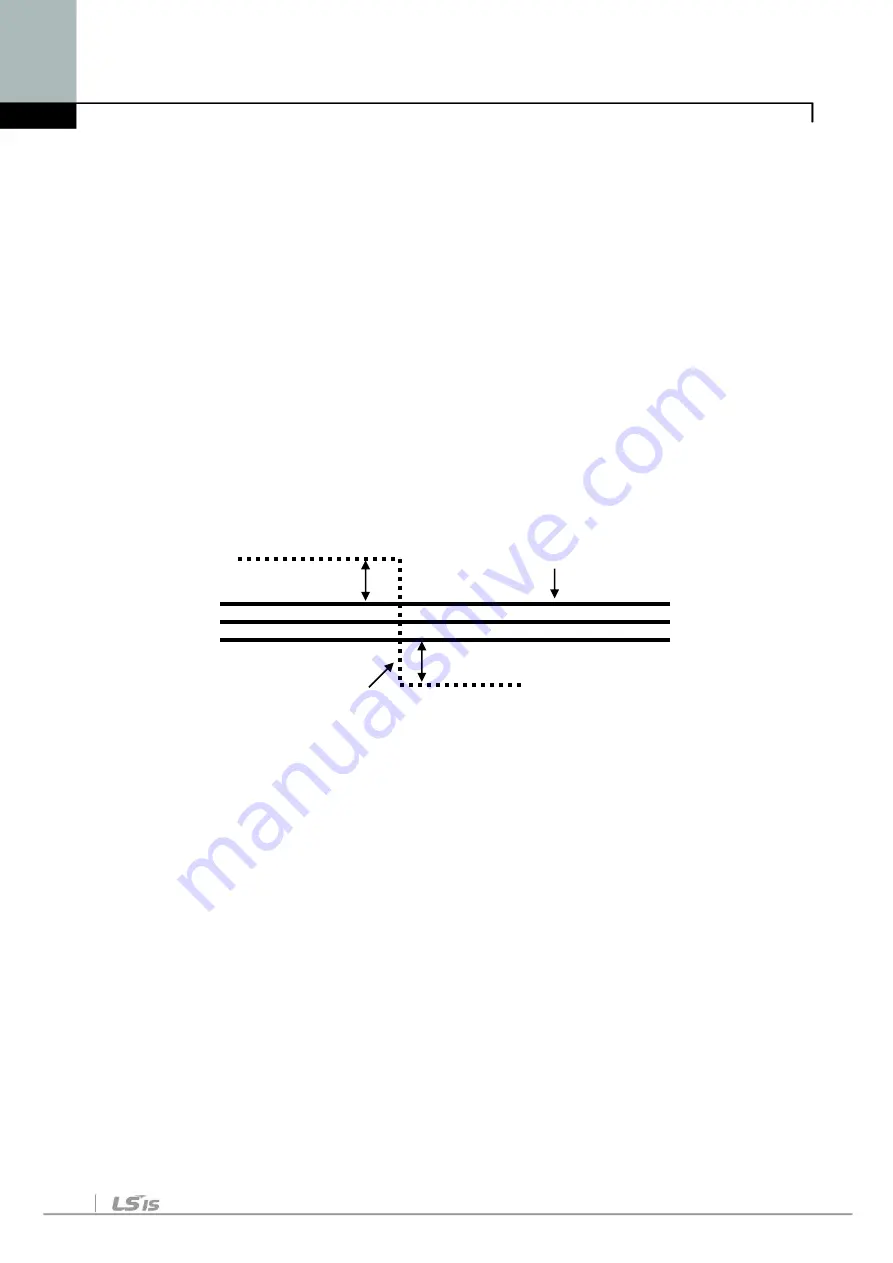
Wires for the control circuit terminal should be separated from ones for the
power circuit terminal, if possible and in case wires for both control circuit
terminal and the power circuit one cross each other, they should be crossed
at right angles (90
).
3.4.4 Caution on wiring pulse encoder
1) Check-up of the coupling and alignment of motor and encoder shaft
①
Be sure to mount the pulse encoder at the location where it rotates at the
same speed as the motor does.
(e.g. on the opposite shaft of load side of motor, on the opposite shaft of
motor at traction machine)
②
In case there is speed slip between the motor shaft and encoder shaft, the
motor may not start or it causes mechanical vibration.
③
Poor alignment of motor and encoder shaft results in torque ripple and
causes mechanical vibration which has the same frequency as the motor
speed at the constant speed region.
2) Wiring the pulse encoder
①
Be sure to use twist paired shield wire and ground shield wire to screw for
earth on the I/O PCB.
②
Signal wires should be separated from the power lines, if possible.
Electromagnetic noise may affect the pulse encoder output signals.
Wires for Control Circuit
Min. distance : 10cm
Wires for Main Circuit
Min. distance : 10cm
Содержание LSLV-iV5 Series
Страница 59: ...4 Trial Operation 4 17 ...
Страница 285: ......







































































