





























6-36
Writing the User Program
ECODRIVE03-FL*-04VRS
DOK-ECODR3-FL*-04VRS**-FK01-EN-P
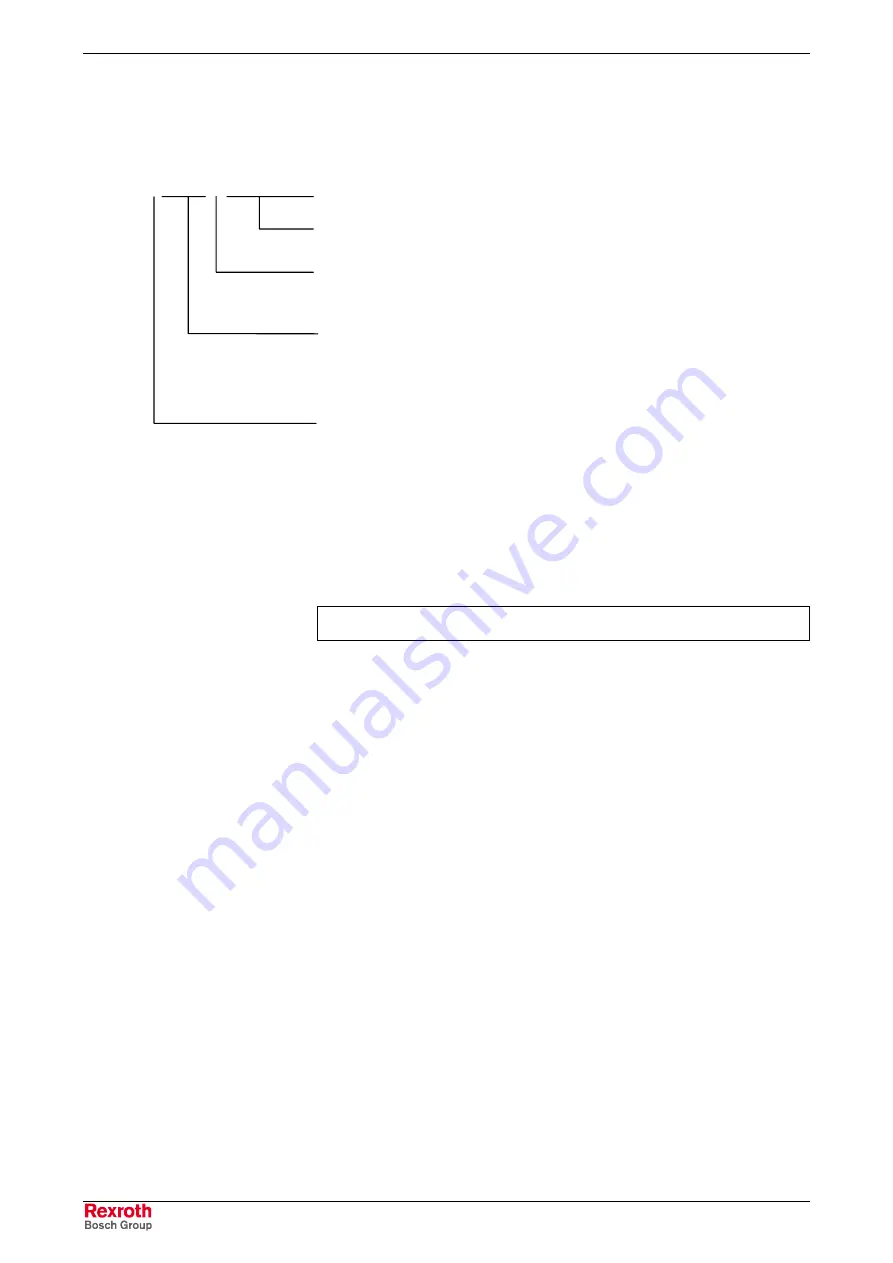
FOL - Follow Master
or
Slave Factor
Input of 0.000000 to 99.999999
Direction, with reference to Master Axis
+ or ` ´= in the same direction
- = in the opposite direction
Slave Axis Mode
0 = Slave Axis OFF
1 = Slave Axis ON, without ramp
2 = Slave Axis ON with acceleration ramp
Dynamic Synchronization
Slave Axis =
1
Using this command, the axis follows a master encoder as a slave axis.
The master is the optional encoder 2.
The 'FOL' command can be used to enable or disable the slave axis
function (with or without an acceleration ramp). The behavior of the slave
axis can also be changed by using a slave factor.
The positioning travel of the slave axis in IU is calculated as follows:
Factor
Slave
IU
Master
Travel
g
Positionin
×
]
[
L:
IU = input units
Fig. 6-20: Calculation of Positioning Travel of Slave Axis
In calculating the positioning travel in IU for the slave and master axes,
the IU shall be considered in terms of the feed constant for the relevant
axis (slave or master). Any differences in the values calculated for the
input units shall also be taken into account.
To synchronize with a rotating master encoder, the slave axis can be
accelerated or decelerated (when switching off equipment) using a ramp.
The acceleration ramp can also be activated when changing the slave
factor. The acceleration is determined in Parameter A108/A109 or with
the ACC command. It is also possible to synchronize without using a
ramp.
An additional positioning motion (e.g., using the POI or PSI commands) is
additive to the positioning of the slave axis. The velocity is therefore
limited, so that the maximum velocity (Parameter A106) is not exceeded.
With the POA/PSA commands, the slave axis is deactivated and it is
positioned to the set absolute position using the set velocity. If a velocity
of 0 is set in the POA/PSA command, positioning is accomplished using
the retrieved current master velocity.
When the operating mode is changed from Homing to Automatic, or vice
versa, the status (enabled or disabled) and the current value of the slave
factor are retained.
Each time a switch from Parameter Mode to Manual or Automatic Mode
occurs, and after an error, the slave axis must be reactivated using the
command.
The master encoder can be selected using the CMM command. If the
CMM command was not invoked, the optional encoder is automatically
set as the default master.
FOL 1 V600 – V601
FOL 1 1 –01.123456
Содержание Rexroth OptiFeed-FS EcoDrive 03 FLP04VRS
Страница 18: ...XVI Table of Contents ECODRIVE03 FL 04VRS DOK ECODR3 FL 04VRS FK01 EN P ...
Страница 58: ...4 20 General Instructions for Start Up ECODRIVE03 FL 04VRS DOK ECODR3 FL 04VRS FK01 EN P Notes ...
Страница 187: ...ECODRIVE03 FL 04VRS Functions 8 41 DOK ECODR3 FL 04VRS FK01 EN P fp5007fj_AE WMF Fig 8 22 Control Loop ...
Страница 241: ...ECODRIVE03 FL 04VRS Parameters 9 29 DOK ECODR3 FL 04VRS FK01 EN P SIC_2_AE WMF Fig 9 12 Signal Control ...
Страница 348: ...11 18 Command Communications ECODRIVE03 FL 04VRS DOK ECODR3 FL 04VRS FK01 EN P Notes ...
Страница 418: ...13 4 Connectors ECODRIVE03 FL 04VRS DOK ECODR3 FL 04VRS FK01 EN P Notes ...
Страница 469: ...ECODRIVE03 FL 04VRS IDS Accessories 16 3 DOK ECODR3 FL 04VRS FK01 EN P IDS_mas_AE WMF Fig 16 5 IDS Dimensions ...
Страница 470: ...16 4 IDS Accessories ECODRIVE03 FL 04VRS DOK ECODR3 FL 04VRS FK01 EN P Notes ...
Страница 489: ......







































































