





























Drive control and features
62
Because the drive speed control uses motor speed, a gear function between position
control (load side) and speed control (motor side) is needed. This gear function is
formed from the motor gear function and inverted load gear function. The gear
function is applied to the position control output (speed reference) as follows:
The equation quite often translates to
Parameters
are also inputs
of the firmware block
(see page
Note:
It is emphasised that all position relevant parameters are load side related, eg,
the setting of parameter
(dynamic limiter speed limitation) of
300 rpm denotes that, with a load gear ratio of 1:10, the motor can run at up to 3000
rpm.
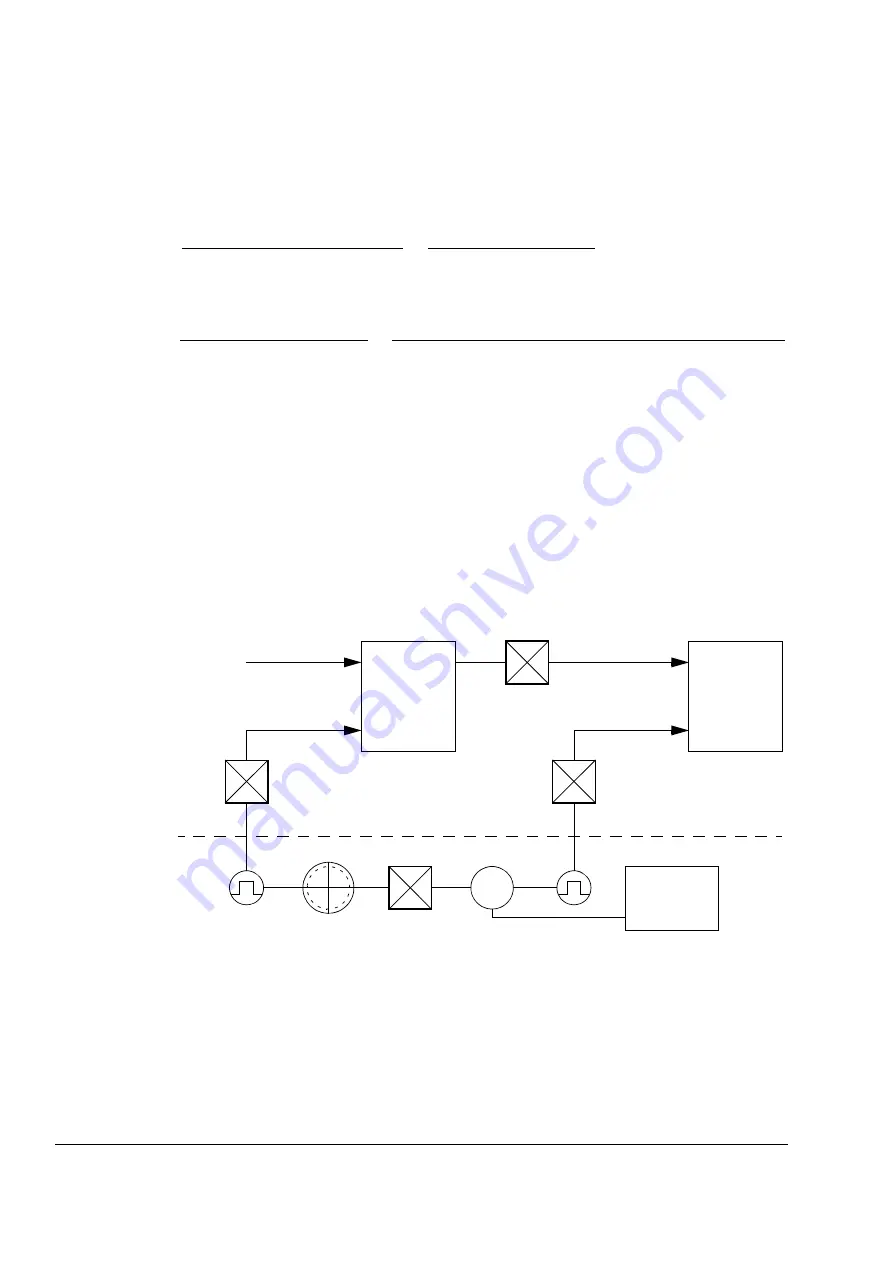
Examples of gear function usage
The following figures demonstrate how the gear functions of the control program are
used.
=
Motor speed
Load speed
=
Drive firmware
Position
control
Position ref.
Speed
control
Gear ratio
Speed ref.
Speed act.
n1:n2
Position act.
1:1
Load encoder gear
/
1:1
Motor encoder gear
n2:n1
M
Mechanical set-up
Drive
hardware
Содержание ACSM1 Series
Страница 1: ...ABB motion control drives Firmware manual ACSM1 motion control program ...
Страница 4: ......
Страница 34: ...Drive programming using PC tools 34 ...
Страница 86: ...Drive control and features 86 ...
Страница 265: ...Parameters and firmware blocks 265 1 100 us 100 µs 2 1 ms 1 ms 3 50 ms 50 ms ...
Страница 302: ...Parameter data 302 ...
Страница 422: ...Application program template 422 ...
Страница 430: ...Appendix A Fieldbus control 430 ...
Страница 500: ...Appendix D Application examples 500 ...
Страница 508: ...Appendix E Control chain and drive logic diagrams 508 ...
Страница 510: ...3AFE68848270 REV H EN 2015 06 26 Contact us www abb com drives www abb com drivespartners ...







































































