





























Drive control and features
82
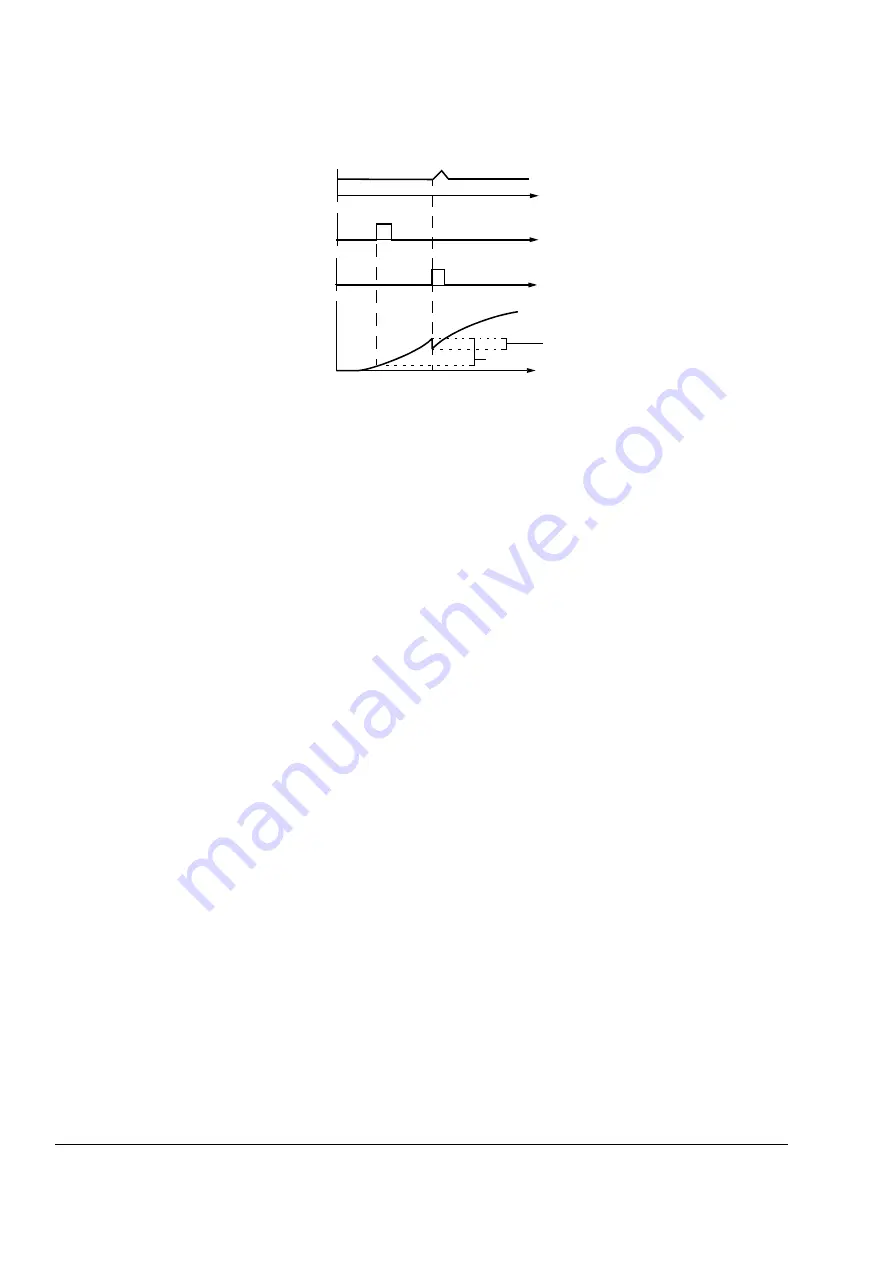
• Rising edge of encoder DI1 (proximity switch signal) is detected at the first mark
of the belt. Position 0 mm is stored to signal
.
• Falling edge of encoder DI2 (proximity switch signal) is detected at the second
mark of the belt. Position 40 mm is stored to signal
.
• The reference distance between the marks is 60 mm and the measured distance
between the marks is 40 mm, thus the error is 20 mm:
(
)] = (60 - 0) - (40 - 0) = 20 mm
Note:
Only after the active correction is finished is the next position latching enabled.
Emergency stop
Note:
The user is responsible for installing the emergency stop devices and all the
additional devices needed for the emergency stop to fulfil the required emergency
stop category classes.
The emergency stop signal is connected to the digital input which is selected as the
source for the emergency stop activation (parameter
or
). Emergency stop can also be activated through fieldbus (
Note:
When an emergency stop signal is detected, the emergency stop function
cannot be cancelled even though the signal is cancelled.
For more information, refer to
Application Guide: Functional Safety Solutions with
ACSM1 Drives
(3AUA0000031517 [English]).
t
t
t
t
Encoder DI1
Encoder DI2
POSITION DERIVATION
MEASURED POSITION DIFFERENCE
Содержание ACSM1 Series
Страница 1: ...ABB motion control drives Firmware manual ACSM1 motion control program ...
Страница 4: ......
Страница 34: ...Drive programming using PC tools 34 ...
Страница 86: ...Drive control and features 86 ...
Страница 265: ...Parameters and firmware blocks 265 1 100 us 100 µs 2 1 ms 1 ms 3 50 ms 50 ms ...
Страница 302: ...Parameter data 302 ...
Страница 422: ...Application program template 422 ...
Страница 430: ...Appendix A Fieldbus control 430 ...
Страница 500: ...Appendix D Application examples 500 ...
Страница 508: ...Appendix E Control chain and drive logic diagrams 508 ...
Страница 510: ...3AFE68848270 REV H EN 2015 06 26 Contact us www abb com drives www abb com drivespartners ...





















































