





























Parameters and firmware blocks
160
25.04
DEC TIME
(see above)
Defines the deceleration time, ie, the time required for the speed to change from the speed value
defined by parameter
to zero.
If the speed reference decreases slower than the set deceleration rate, the motor speed will follow the
reference signal.
If the reference changes faster than the set deceleration rate, the motor speed will follow the
deceleration rate.
If the deceleration time is set too short, the drive will automatically prolong the deceleration in order
not to exceed drive torque limits. If there is any doubt about the deceleration time being too short,
ensure that the DC overvoltage control is on (parameter
).
Note:
If a short deceleration time is needed for a high inertia application, the drive should be equipped
with an electric braking option, eg, with a braking chopper (built-in) and a braking resistor.
0…1800 s
Deceleration time.
25.05
SHAPE TIME ACC1
(see above)
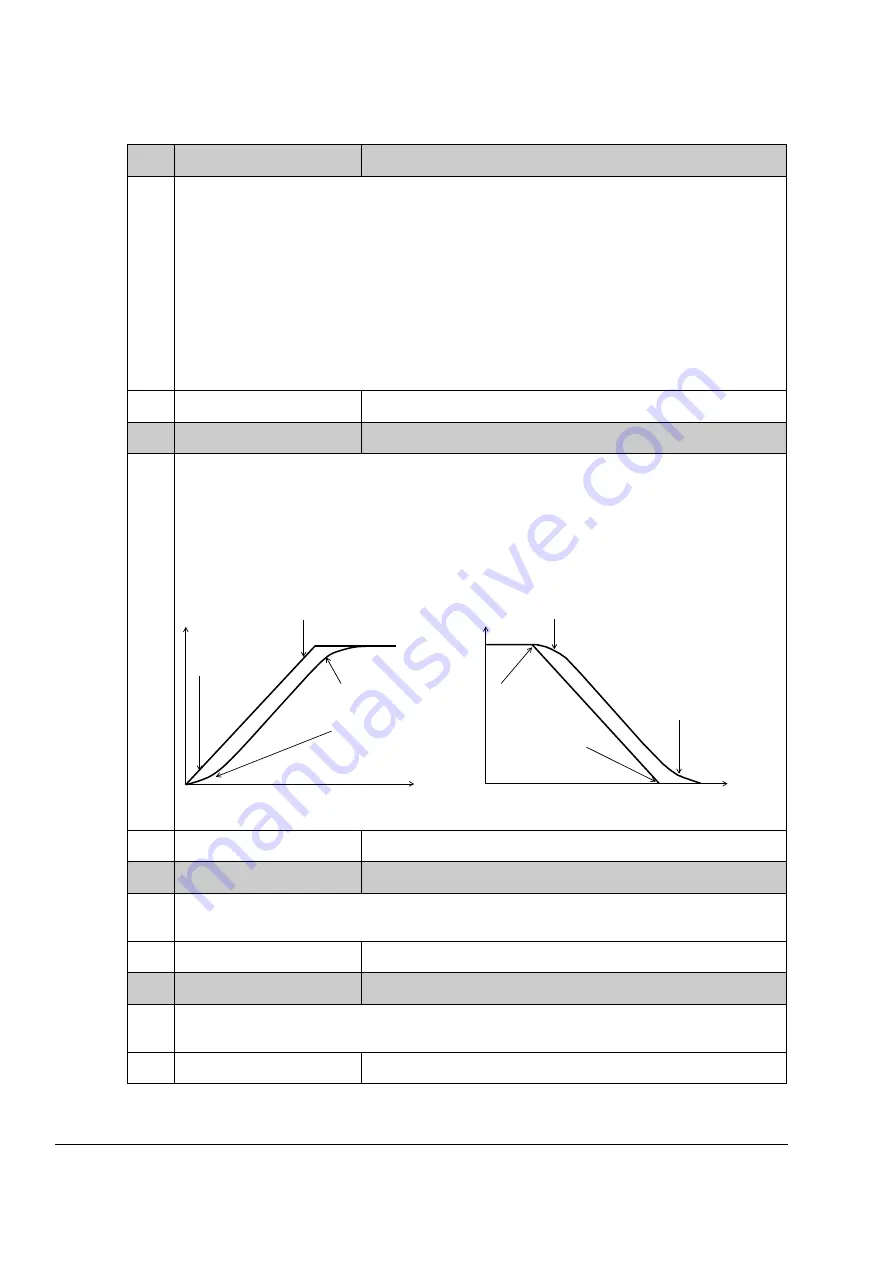
Selects the shape of the acceleration ramp at the beginning of the acceleration.
0.00 s: Linear ramp. Suitable for steady acceleration or deceleration and for slow ramps.
0.01…1000.00 s: S-curve ramp. S-curve ramps are ideal for conveyor and lifting applications. The S-
curve consists of symmetrical curves at both ends of the ramp and a linear part in between.
Note:
When jogging or emergency ramp stop is active, acceleration and deceleration shape times are
forced to zero.
0…1000 s
Ramp shape at beginning of acceleration.
25.06
SHAPE TIME ACC2
(see above)
Selects the shape of the acceleration ramp at the end of the acceleration. See parameter
0…1000 s
Ramp shape at end of acceleration.
25.07
SHAPE TIME DEC1
(see above)
Selects the shape of the deceleration ramp at the beginning of the deceleration. See parameter
0…1000 s
Ramp shape at beginning of deceleration.
S-curve ramp:
Par.
Linear ramp:
Par.
Linear ramp:
Par.
S-curve ramp:
Par.
> 0 s
= 0 s
Speed
Time
Speed
= 0 s
Time
Содержание ACSM1 Series
Страница 1: ...ABB motion control drives Firmware manual ACSM1 motion control program ...
Страница 4: ......
Страница 34: ...Drive programming using PC tools 34 ...
Страница 86: ...Drive control and features 86 ...
Страница 265: ...Parameters and firmware blocks 265 1 100 us 100 µs 2 1 ms 1 ms 3 50 ms 50 ms ...
Страница 302: ...Parameter data 302 ...
Страница 422: ...Application program template 422 ...
Страница 430: ...Appendix A Fieldbus control 430 ...
Страница 500: ...Appendix D Application examples 500 ...
Страница 508: ...Appendix E Control chain and drive logic diagrams 508 ...
Страница 510: ...3AFE68848270 REV H EN 2015 06 26 Contact us www abb com drives www abb com drivespartners ...





















































