





























126 Parameters
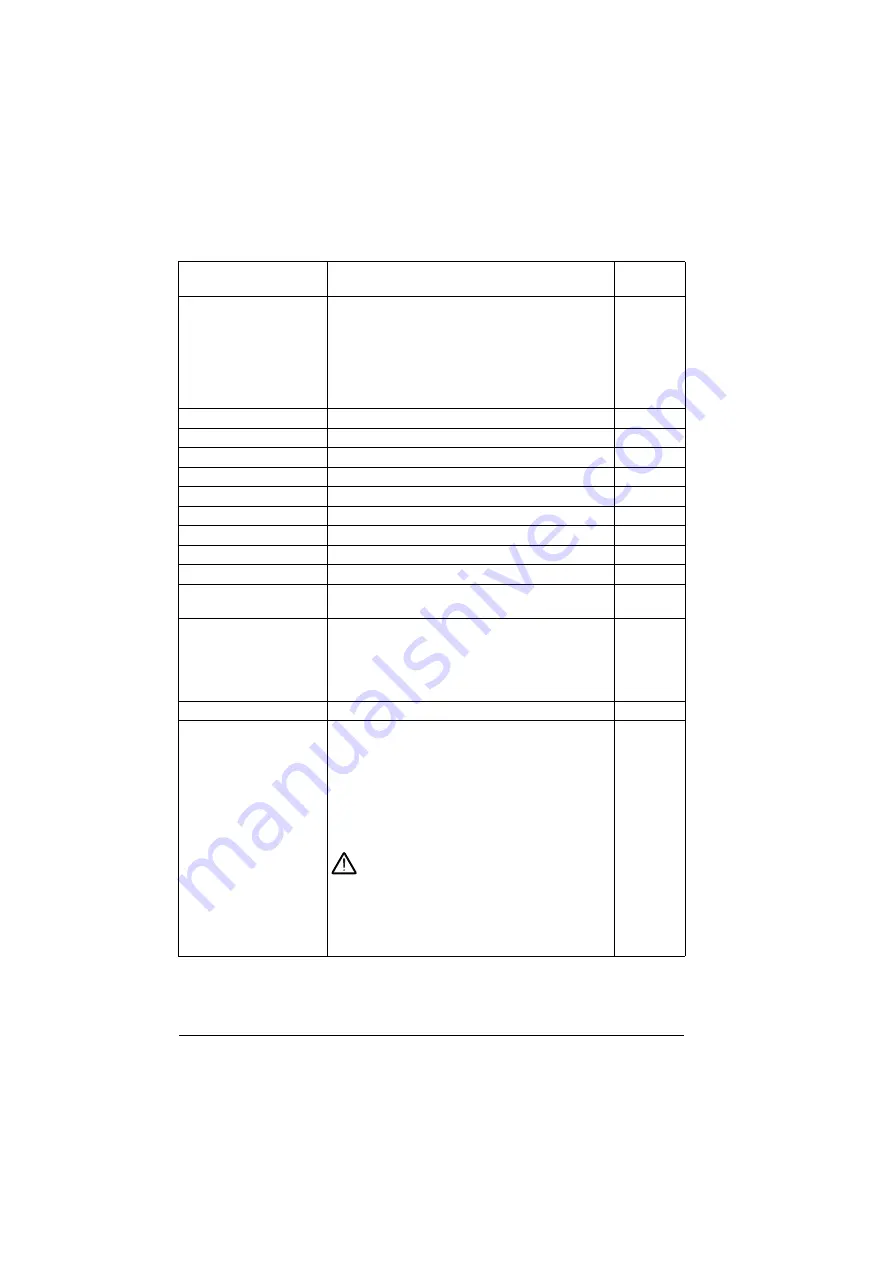
Selects the source of the emergency stop signal.
The stop mode is selected by parameter
.
0 = Emergency stop active
1 = Normal operation
Note:
This parameter cannot be changed while
the drive is running.
Active (false)
0.
0
Inactive (true)
1.
1
Reserved
2
DI1
Digital input DI1 (
, bit 0).
3
DI2
Digital input DI2 (
, bit 1).
4
DI3
Digital input DI3 (
, bit 2).
5
DI4
Digital input DI4 (
, bit 3).
6
DI5
Digital input DI5 (
, bit 4).
7
DI6
Digital input DI6 (
, bit 5).
8
Source selection (see
on
page
-
Selects the motor start function for the scalar
is set to
.
Note
: This parameter cannot be changed while
the drive is running.
Normal
Immediate start from zero speed.
0
Const time
The drive pre-magnetizes for 500ms the motor
before start. This mode should be selected if
constant pre-magnetizing time is required. This
setting also guarantees the highest possible
break-away torque when the pre-magnetizing
time is set long enough.
Note:
This mode cannot be used to start into a
rotating motor.
WARNING!
The drive will start after the set
pre-magnetizing time has passed even if
motor magnetization is not completed. In
applications where a full break-away torque is
essential, ensure that the constant magnetizing
time is long enough to allow generation of full
magnetization and torque.
1
No.
Name/Value
Description
Def/
FbEq16
Содержание ACQ80
Страница 1: ... ABB DRIVES FOR WATER ACQ80 standard program control Firmware manual ...
Страница 2: ... Related documents are listed on page 13 ...
Страница 4: ......
Страница 10: ...10 Table of contents ...
Страница 32: ...32 Startup control with I O and ID run ...
Страница 34: ...34 Using the control panel ...
Страница 74: ...74 Program features ...
Страница 78: ...78 Control macros ...
Страница 380: ...380 Fieldbus control through a fieldbus adapter ...
Страница 384: ...384 Parameterization with Drive Composer ...
Страница 388: ...388 Parameterization with Automation builder drive manager ...







































































