





























R1: Reference point approach
15.9 Referencing with absolute value encoders
Basic Functions
Function Manual, 09/2011, 6FC5397-0BP40-2BA0
1243
Requirement
The function can be used only with rotary absolute encoders:
• MD31000 $MA_ENC_IS_LINEAR = 0
• MD30240 $MA_ENC_TYPE = 4
Internal encoder position
MD30250 $MA_ACT_POS_ABS
Value is updated only in MD34210 ≥ 1 Value is updated only in MD30270 = 0
Traversing range extension
MD30270 $MA_ENC_ABS_BUFFERING
No effect
= 0 (default): Active
Reference point offset
MD34090 $MA_REFP_MOVE_DIST_CORR
Value input allowed
Value is updated exclusively via control
Supported referencing types
MD34200 $MA_ENC_REFP_MODE
= 1, 2, 3, 4, 5, 6, 7
= 0, 1, 2
Adjustment status
MD34210 $MA_ENC_REFP_STATE = 0, 1, 2
Automatic encoder misalignment during
shut down while in motion.
Automatic encoder misalignment during
parameter set change with position jump or
during serial number change.
Absolute position modulo range
MD34220 $MA_ENC_ABS_TURNS_MODULO
= 0
= 1 - 4096
Encoder Serial No.
MD34230 $MA_ENC_SERIAL_NUMBER
= 0
The value must be updated from the PLC
during each encoder change, otherwise loss
of adjustment plus alarm.
Transfer of series startup files
Without any restrictions.
Due to encoder properties
MD30250, MD30270, MD34090, MD34210,
MD34220, MD34230
only possible with limitations.
Cam activation time
0 seconds
several seconds
Nullmarke
1 per encoder revolution
none
Zero mark monitoring
Hardware
Software
Position after POWER ON without
actual value buffering
0.0
Last position within MD34220.
MD34210 = 0
MD30270 = 1
Position after POWER ON with
actual value buffering
Last standstill position before
deactivation.
Last position including small movements
during POWER OFF.
MD34210 = 1
MD30270 = 0
Referenced after POWER ON
depends on adjustment status
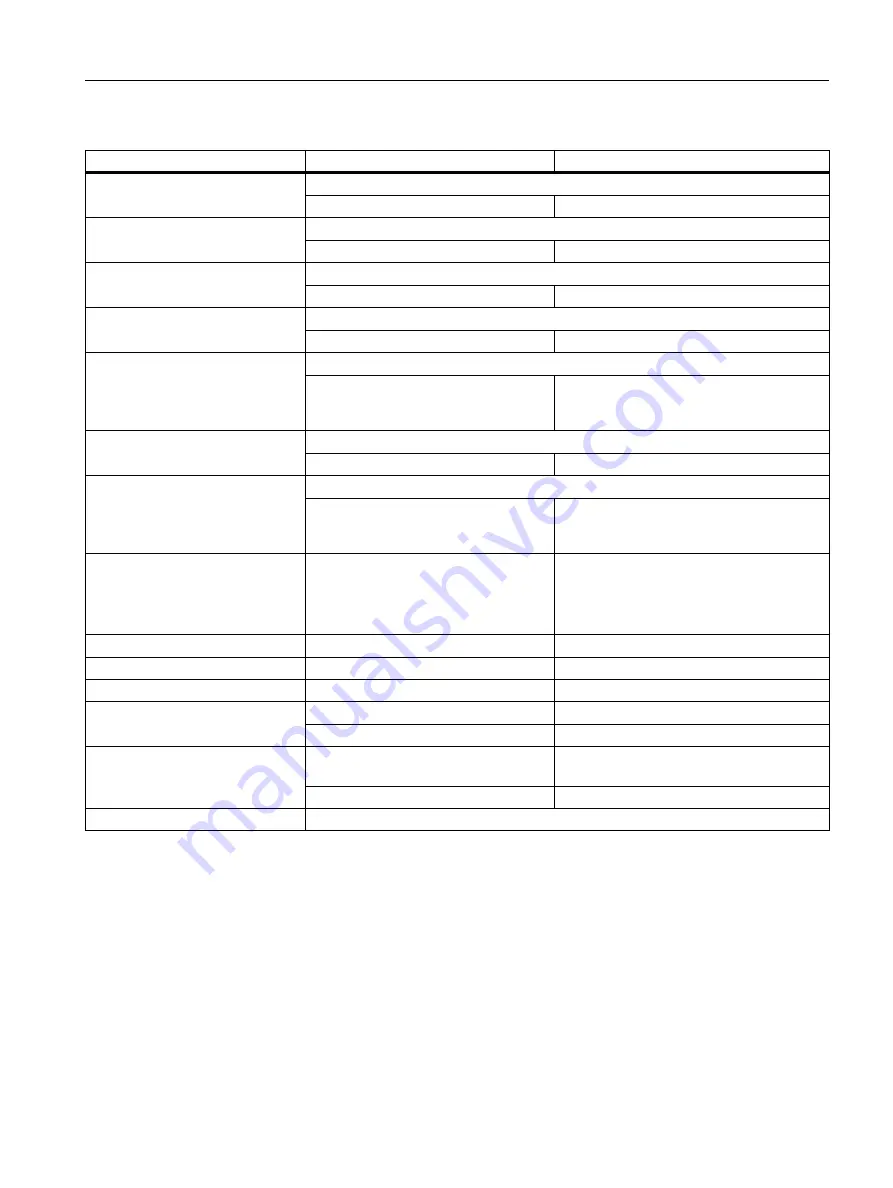
Table 15-1
Properties of incremental and absolute encoders
Feature
Incremental encoder
Absolute encoders







































































