





























Goodrive3000 series medium voltage VFD
Goodrive3000 inverter
-186-
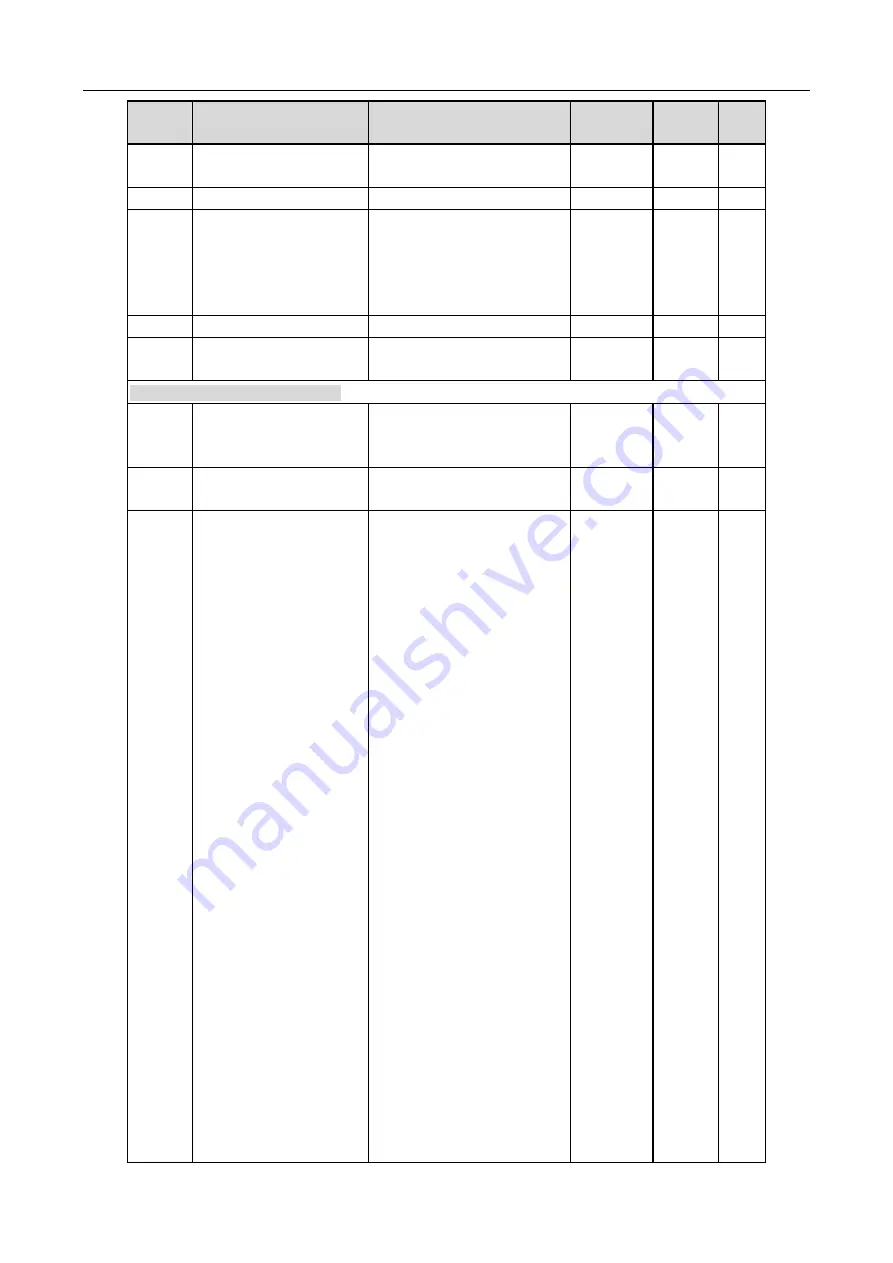
Function
code
Name
Description
Setting
range
Default Modify
P20.07
–
P20.09
Reserved
○
P20.10
Pole initial angle
0.00
–359.99
0.00
–359.99
0
○
P20.11
Autotuning pole initial angle
0
–2
0: No operation
1: Rotary autotuning
2: Static autotuning (suitable for
resolver-type encoder feedback)
0
–2
0
◎
P20.12
Initial angle of SM U pulse 0
–65535
0
–65535
0
○
P20.13
–
P20.14
Reserved
P21 group
––Master/slave control
P21.00
Master/slave mode
0: Master/slave control is invalid.
1: The local device is the master.
2: The local device is the slave.
0
–2
0
◎
P21.01
Master/slave communication
data selection
0: CAN
1: RS485
0
–1
0
◎
P21.02
Master/slave control
multifunction mode
Ones
place:
Master/slave
running mode
0: Master/slave mode 0
(Both the master and slave use
speed
control,
and
power
balancing is performed by droop
control.)
1: Master/slave mode 1
(The master and slave must be
in the same type of vector control
mode.
The
master
is
speed-controlled and the slave
will be forced into torque control
mode.)
2: Master/slave mode 2
(Both the master and slave use
speed control, and the slave is
balanced by using the speed
loop integration result of the
master.)
3: Combination mode
The slave switches from speed
mode (master/slave mode 0) to
torque mode (master/slave mode
1) at a frequency point.
Tens place: Slave start command
source
0: Master
1: Determined by P00.01
Hundreds
place:
Slave
transmitting/master
receiving
0x000
–
0x113
0x100
◎







































































