



























Chapter 6 Specification of Parameters
GK600 User Manual
- 214 -
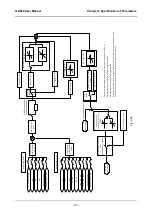
Fig. 6-53
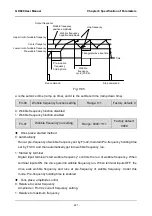
2: Continue to run from the step and frequency at which the run stopped (or fault occurred)
At the moment of stop, the drive not only records the run time of current step, but also
records the run frequency at the moment of stop. When restarted, it will restore the run
frequency that was recorded at the moment of stop, and then continue to run the remanent
step, as shown in Fig. 6-54:
Fig. 6-54
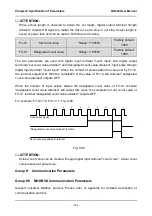
Thousands place: unit of simple PLC run time
0: Second
1: Minute
Sets the unit of running time and Accel/Decel time of simple PLC.
输出频率
时间
阶段
0
运行时间
阶段
1
运行时间
阶段
2
已
运行时间
阶段
2
剩余
运行时间
阶段
3
运行时间
运行命令
故障,自由停车
a0
f0
a1
f1
d2
a2
f2
a3
f3
输出频率
时间
阶段
0
运行时间
阶段
1
运行时间
阶段
2
已
运行时间
阶段
2
剩余
运行时间
阶段
3
运行时间
运行命令
故障,自由停车
a0
f0
a1
f1
d2
a2
f2
a3
f3
d2
Output frequency
Coast to stop at fault
Run time
of step 0
Run
time of
step 1
Run time
of step 2
Remanent
time of
step 2
Run time
of step 3
Time
Run command
Output frequency
Coast to stop at fault
Run time
of step 0
Run
time of
step 1
Run time
of step 2
Remanent
time of
step 2
Run time
of step 3
Time
Run
command







































































