




























Chapter 6 Specification of Parameters GK600 User Manual
- 178 -
autotuning, and the result will be automatically saved upon the completion of autotuning. Be
sure to correctly input motor 1 parameters d0-01~d0-06 before autotuning.
0: No autotuning
1: Static autotuning
Static autotuning applies to the cases where rotary autotuning cannot be favorably
performed due to the fact that it is impossible to disengage the motor from its load. After
d0-22 is set to 1 and confirmed, press the key RUN to start static autotuning. d0-22 will be
restored to 0 upon the successful completion of autotuning. In this way, parameters
d0-07~d0-09 are obtained.
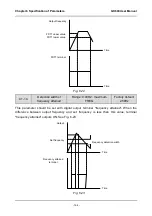
2: Rotary autotuning
To perform rotary autotuning, it is essential to disengage the motor from its load. Autotuning
is prohibited when motor is loaded. After d0-22 is set to 2 and confirmed, press RUN to
perform static autotuning, upon the completion of which, the motor would accelerate to a
fixed frequency in the set ramp-up time, maintaining a period of time, and then stop by ramp
down according to the set ramp down time. In this way, the autotuning comes to an end, and
d0-22 will be restored to 0. Parameters d0-07~d0-14 have be obtained after the successful
completion of rotary autotuning. To perform rotary autotuning, please set appropriate
ramp-up and ramp-down time (i.e. Accel/Decel time. If overcurrent or overvoltage fault
occurs during autotuning, please prolong Accel/Decel time accordingly.
ATTENTION:
Please make sure the motor is in a stationary state before the autotuning, or autotuning
cannot be performed normally. Control panel displays "TUNE" and RUN indicator light is on
during autotuning. RUN indicator light is off upon the completion of autotuning. Once
autotuning fails, the fault code "tUN" shall be displayed.
d0-23
Overload protection of
motor 1
Range: 0~2
Factory default: 1
Determine the overload protection of motor 1.
0: No protection
Once 0 is selected, it would be impossible to perform motor overload protection. Please take
care.
1: Judged by motor current
Provide overload protection judged from output current and its lasting time. Overload
protection detection time is set by d0-24.
2: Judged by temperature transducer
Input motor temperature sensor signal through analog input channel set by d0-25. The signal
voltage is compared with the protection threshold set by d0-26. If it is higher than protection
threshold, motor overheat fault "oH2" could be displayed.







































































