




























DRV-28 inverter
s Basic operartion instructions
-66-
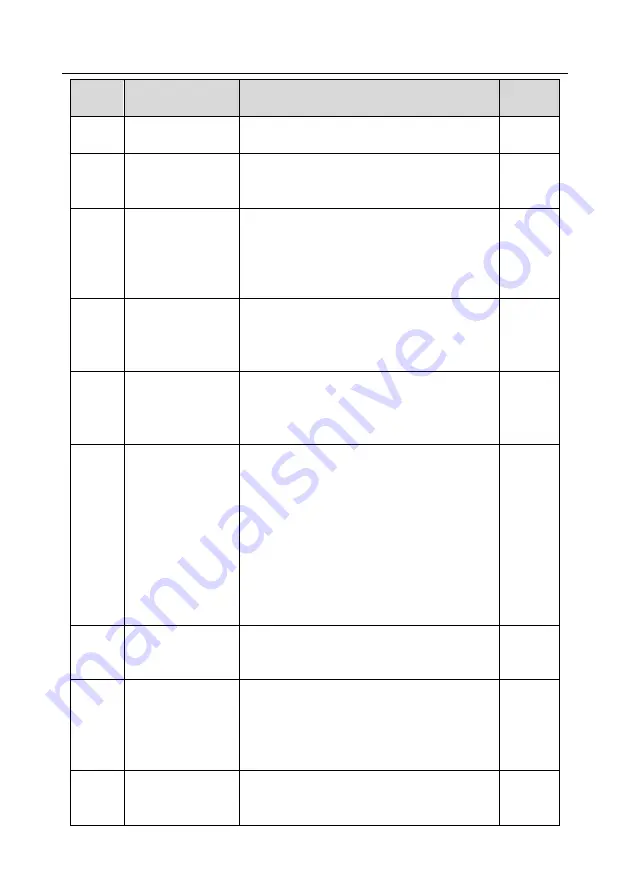
Function
code
Name
Detailed parameter description
Default
value
need to modify this parameter.
Setting range: 0–16000
P04.40
Enable/disable IF
mode for
asynchronous motor 1
0: Disabled
1: Enabled
0
P04.41
Current setting in IF
mode for
asynchronous motor 1
When IF control is adopted for asynchronous motor
1, this parameter is used to set the output current.
The value is a percentage in relative to the rated
current of the motor.
Setting range: 0.0–200.0%
120.0%
P04.42
Proportional
coefficient in IF mode
for asynchronous
motor 1
When IF control is adopted for asynchronous motor
1, this parameter is used to set the proportional
coefficient of the output current closed-loop control.
Setting range: 0–5000
650
P04.43
Integral coefficient in
IF mode for
asynchronous motor 1
When IF control is adopted for asynchronous motor
1, this parameter is used to set the integral
coefficient of the output current closed-loop control.
Setting range: 0–5000
350
P04.44
Frequency threshold
for switching off IF
mode for
asynchronous motor 1
When IF control is adopted for asynchronous motor
1, this parameter is used to set the frequency
threshold for switching off the output current
closed-loop control. When the frequency is lower
than the value of this parameter, the current
closed-loop control in the IF control mode is
enabled; and when the frequency is higher than
that, the current closed-loop control in the IF control
mode is disabled.
Setting range: 0.00–20.00 Hz
10.00Hz
P04.45
Enable/disable IF
mode for
asynchronous motor 2
0: Disabled
1: Enabled
0
P04.46
Current setting in IF
mode for
asynchronous motor 2
When IF control is adopted for asynchronous motor
2, this parameter is used to set the output current.
The value is a percentage in relative to the rated
current of the motor.
Setting range: 0.0–200.0%
120.0%
P04.47
Proportional
coefficient in IF mode
for asynchronous
When IF control is adopted for asynchronous motor
2, this parameter is used to set the proportional
coefficient of the output current closed-loop control.
650







































































