





























DRV-28 inverter
s Basic operartion instructions
-121-
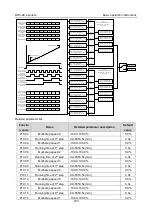
P21.12 (set positioning displacement) based on actual needs; set P21.21 (deceleration time of
positioning), however, when present running speed is too fast or the set positioning displacement is
too small, the deceleration time of positioning will be invalid, and it will enter direct deceleration
positioning mode.
Step 6: Cyclic positioning
After positioning is done, the motor will stay in current position. Users can set cyclic positioning
through input terminal function selection (55: enable cyclic digital positioning) in P05 group; when the
terminal receives cyclic positioning enable signal (pulse signal), the motor will continue running in the
set speed as per the speed mode and re-enter positioning state after encountering photoelectric
switch.
(7) Hold positioning
The position loop gain during positioning is P21.03; while the position loop gain in
positioning-completion-hold state is P21.02. In order to keep sufficient position-hold force and ensure
no system oscillation occurred, adjust P03.00, P03.01, P20.05 and P21.02.
5.5.19 Fault handling
DRV-28 series inverter provides abundant information concerning fault handling for the convenience
of the users.
In running
Fault occurred, and the
keypad displayed fault
code
Figure out the fault
cause based on the
fault code
Figure out the most possible
cause according to P07.33
–
P07.40
Run again
Proper running
Rule out
fault based on
corresponding
solutions
Consult with INVT
Y
N
N
Y







































































