




























DRV-28 inverter
s Basic operartion instructions
-115-
Function
code
Name
Detailed parameter description
Default
value
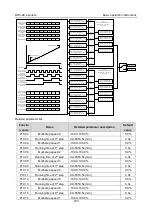
P05.00
HDI input type
0x00–0x11
Ones: HDIA input type
0: HDIA is high-speed pulse input
1: HDIA is digital input
Tens: HDIB input type
0: HDIB is high-speed pulse input
1: HDIB is digital input
0x00
P05.38
HDIA high-speed pulse input
function
0: Set input via frequency
1: Reserved
2: Input via encoder, used in combination
with HDIB
0
P05.44
HDIB high-speed pulse input
function selection
0: Set input via frequency
1: Reserved
2: Input via encoder, used in combination
with HDIA
0
P20.15
Speed measurement mode
0: PG card
1: local; realized by HDIA and HDIB;
supports incremental 24V encoder only
0
P18.00
Actual frequency of encoder -999.9–3276.7Hz
0.0Hz
5.5.18 Commissioning procedures for position control and spindle positioning function
1. Commissioning procedures for closed-loop vector control of asynchronous motor
Step 1: Restore to default value via keypad
Step 2: Set P00.03, P00.04 and P02 group motor nameplate parameters
Step 3: Motor parameter autotuning
Carry out rotary parameter autotuning or static parameter autotuning via keypad, if the motor can be
disconnected from load, then it is users can carry out rotary parameter autotuning; otherwise, carry
out static parameter autotuning, the parameter obtained from autotuning will be saved in P02 motor
parameter group automatically.
Step 4:
Verify whether the encoder is installed and set properly
a) Confirm the encoder direction and parameter setup
Set P20.01 (encoder pulse-per-revolution), set P00.00=2 and P00.10=20Hz, and run the inverter, at
this point, the motor rotates at 20Hz, observe whether the speed measurement value of P18.00 is
correct, if the value is negative, it indicates the encoder direction is reversed, under such situation, set
P20.02 to 1; if the speed measurement value deviates greatly, it indicates P20.01 is set improperly.
Observe whether P18.02 (encoder Z pulse count value) fluctuates, if yes, it indicates the encoder
suffers interference or P20.01 is set improperly, requiring users to check the wiring and the shielding







































































