





























DRV-28 inverter
s Basic operartion instructions
-73-
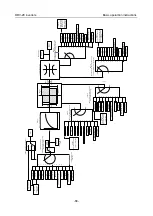
The control performance of the inverter is based on accurate motor model, therefore, users need to
carry out motor parameter autotuning before running the motor for the first time (take motor 1 as an
example)
Ready
P00.01=0 (controlled by
keypad)
Motor type
(P02.00)
P02.00=1
P02.00=0
Input motor nameplate
(P02.15
–
P02.19)
Input motor nameplate
(P02.01
–
P02.05)
Complete parameter
rotary autotuning
Partial parameter rotary
autotuning
Set autotuning mode
(P00.15)
Press "RUN" key to start
autotuning
Autotuning finished
During autotuning
Synchronous
motor
Asynchronous
motor
Complete parameter
static autotuning
Note:
1.
Motor parameters must be set correctly according to motor nameplate;
2.
If rotary autotuning is selected during motor autotuning, it is a must to disconnect the motor from
load to put the motor in static and no-load state, failed to do so may lead to inaccurate autotuned
results. At this time, the asynchronous motor can autotune P02.06–P02.10, and synchronous
motor can autotune P02.20–P02.23
3.
If static autotuning is selected during motor autotuning, there is no need to disconnect the motor







































































