




























DRV-28 inverter
s Basic operartion instructions
-55-
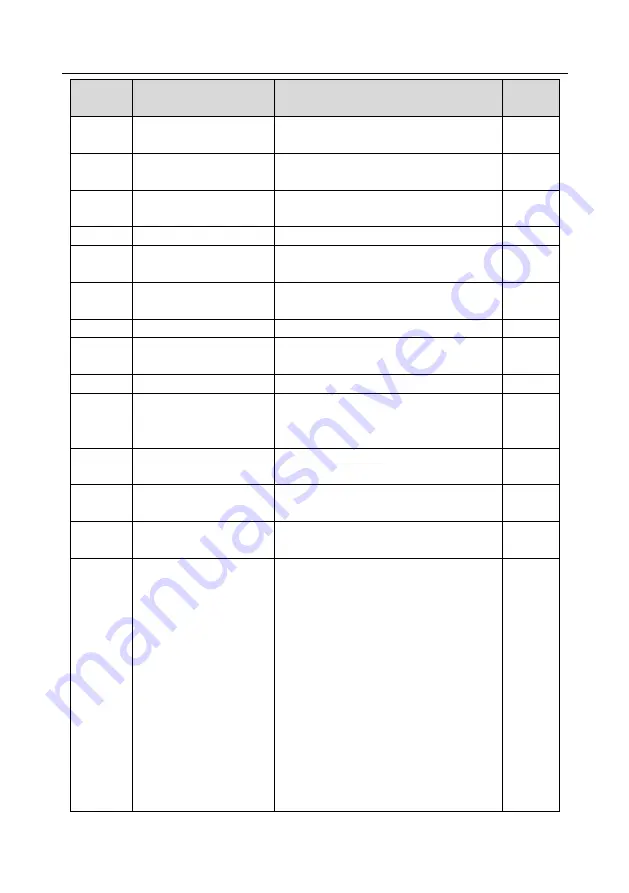
Function
code
Name
Detailed parameter description
Default
value
only P12.06, P12.07 and P12.08 will be
autotuned.
P02.00
Type of motor 1
0: Asynchronous motor
1: Synchronous motor
0
P03.00
Speed loop proportional
gain 1
0–200.0
20.0
P03.01
Speed loop integral time 1
0.000–10.000s
0.200s
P03.02
Switching low point
frequency
0.00Hz–P03.05
5.00Hz
P03.03
Speed loop proportional
gain 2
0–200.0
20.0
P03.04
Speed loop integral time 2
0.000–10.000s
0.200s
P03.05
Switching high point
frequency
P03.02–P00.03 (Max. output frequency)
10.00Hz
P03.06
Speed loop output filter
0–8 (corresponds to 0–2
8
/10ms)
0
P03.07
Electromotion slip
compensation coefficient of
vector control
50%–200%
100%
P03.08
Brake slip compensation
coefficient of vector control
50%–200%
100%
P03.09
Current loop proportional
coefficient P
0–65535
1000
P03.10
Current loop integral
coefficient I
0–65535
1000
P03.11
Torque setup mode
selection
1: Set via keypad (P03.12)
2: Set via AI1 (100% corresponds to three
times of rated motor current)
3: Set via AI2 (the same as above)
4: Set via AI3 (the same as above)
5: Set via pulse frequency HDIA (the same
as above)
6: Set via multi-step torque (the same as
above)
7: Set via MODBUS communication (the
same as above)
8: Set via PROFIBUS/CANopen/DeviceNet
communication (the same as above)
9: Set via Ethernet communication (the
1







































































