





























DRV-28 inverter
s Basic operartion instructions
-119-
check the scale-division position state and switch to corresponding position incrementally, at this point,
users can check P18.09.
Step 8: Priority level of speed control, position control and zeroing
The priority level of speed running is higher than that of the scale division, when the system runs in
scale-division mode, if spindle orientation is prohibited, the motor will turn to speed mode or position
mode.
The priority level of zeroing is higher than that of the scale division.
Scale-division command is valid when the scale-division terminal is from 000 state to non-000 state,
eg, in 000–011, the spindle executes scale division 3. The transition time during terminal switch-over
needs to be less than 10ms; otherwise, wrong scale division command may be executed.
Step 9: Hold
positioning
The position loop gain during positioning is P21.03; while the position loop gain in
positioning-completion-hold state is P21.02. In order to keep sufficient position-hold force and ensure
no system oscillation occurred, adjust P03.00, P03.01, P20.05 and P21.02.
Step 10: Positioning command selection
(bit6 of P22.00)
Electric level signal: Positioning command (zeroing and scale division) can be executed only when
there is running command or the servo is enabled.
Step 11: Spindle reference point selection
(bit0 of P22.00)
Encoder Z pulse positioning supports the following spindle positioning modes:
a) the encoder is installed on the motor shaft, the motor shaft and spindle is 1:1 rigid connection;
b) the encoder is installed on the motor shaft, the motor shaft and spindle is 1:1 belt connection;
At this point, the belt may slip during high-speed running and cause inaccurate positioning, it is
recommended to install proximity switch on the spindle.
c) The encoder is installed on the spindle, and the motor shaft is connected to the spindle with
belt, the drive ratio is not necessarily 1:1;
At this point, set P20.06 (speed ratio of the mounting shaft between motor and encoder), and set
P22.14 (spindle drive ratio) to 1. As the encoder is not installed on the motor, the control performance
of closed-loop vector will be affected.
Proximity switch positioning supports the following spindle positioning modes:
a) The encoder is installed on the motor shaft, the drive ratio between motor shaft and spindle is
not necessarily 1:1;
At this point, it is required to set P22.14 (spindle drive ratio).
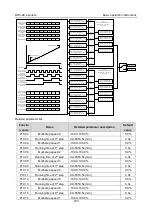
5. Commissioning procedures for digital positioning
The diagram for digital positioning is shown below.







































































