




























DRV-28 inverter
s Basic operartion instructions
-60-
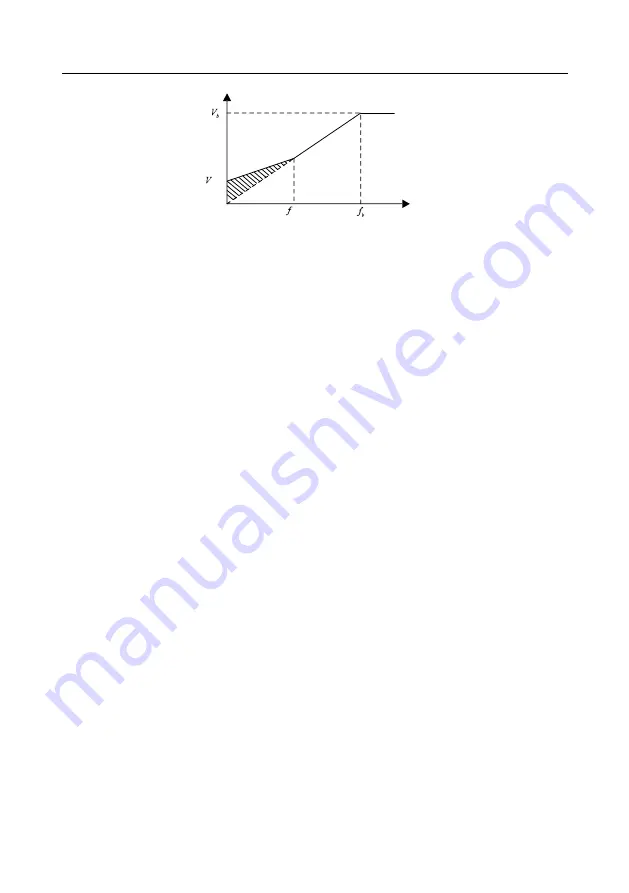
Output voltage V
Output frequency f
cut-off
boost
2.
Energy-saving run
During actual running, the inverter can search for the max. efficiency point to keep running in the most
efficient state to save energy.
Note:
(1)
This function is generally used in light load or no-load cases.
(2)
This function does for fit in cases where load transient is required.
3.
V/F slip compensation gain
SVPWM control belongs to open-loop mode, which will cause motor speed to fluctuate when motor
load transients. In cases where strict speed requirement is needed, users can set the slip
compensation gain to compensate for the speed variation caused by load fluctuation through
internal output adjustment of inverter.
The set range of slip compensation gain is 0–200%, in which 100% corresponds to rated slip
frequency.
Note:
Rated slip frequency= (rated synchronous speed of motor-rated speed of motor) × number of
motor pole pairs/60
4.
Oscillation control
Motor oscillation often occurs in SVPWM control in large-power drive applications. To solve this
problem, DRV-28 series inverter sets two function codes to control the oscillation factor, and users
can set the corresponding function code based on the occurrence frequency of oscillation.
Note:
The larger the set value, the better the control effect, however, if the set value is too large, it
may easily lead to too large inverter output current.
5.
Asynchonous motor IF control
Generally, the IF control mode is valid for asynchronous motors. It can be used for a synchronous
motor only when the frequency of the synchronous motor is extremely low. Therefore, the IF control
described in this manual is only involved with asynchonrous motors. IF control is implemented by
performing closed-loop control on the total output current of the inverter. The output voltage adapts to
the current reference, and open-loop control is separately performed over the frequency of the
voltage and current.
Customized V/F curve (V/F separation) function:







































































