





























4-
34
Operation
4
9. “AUTO” mode
9.6
Changing the automatic movement speed
Automatic movement speed for the selected robot group can be set within the range of 1
to 100%.
[Procedure]
1) Press the
F 4
(VEL+) or
F 5
(VEL-) key in “AUTO” mode to change the
speed in steps.
Each time the
F 4
(VEL+) or
F 5
(VEL-) key is pressed, the speed changes
in steps of 1
←
→
5
←
→
20
←
→
50
←
→
100%.
The maximum motor speed is set at 100%.
2) Press the
F 9
(VEL++) or
F 10
(VEL--) key to change the speed gradually.
Each time the
F 9
(VEL++) or
F 10
(VEL--) key is pressed, the speed
changes in units of 1%.
Holding down the key changes the speed continuously.
9.7
Executing the point trace
Point data positions can be checked by actually moving the robot arm in the following
modes.
• PTP motion mode
• Arch motion mode
• Linear interpolation motion mode (main robot only)
[Procedure]
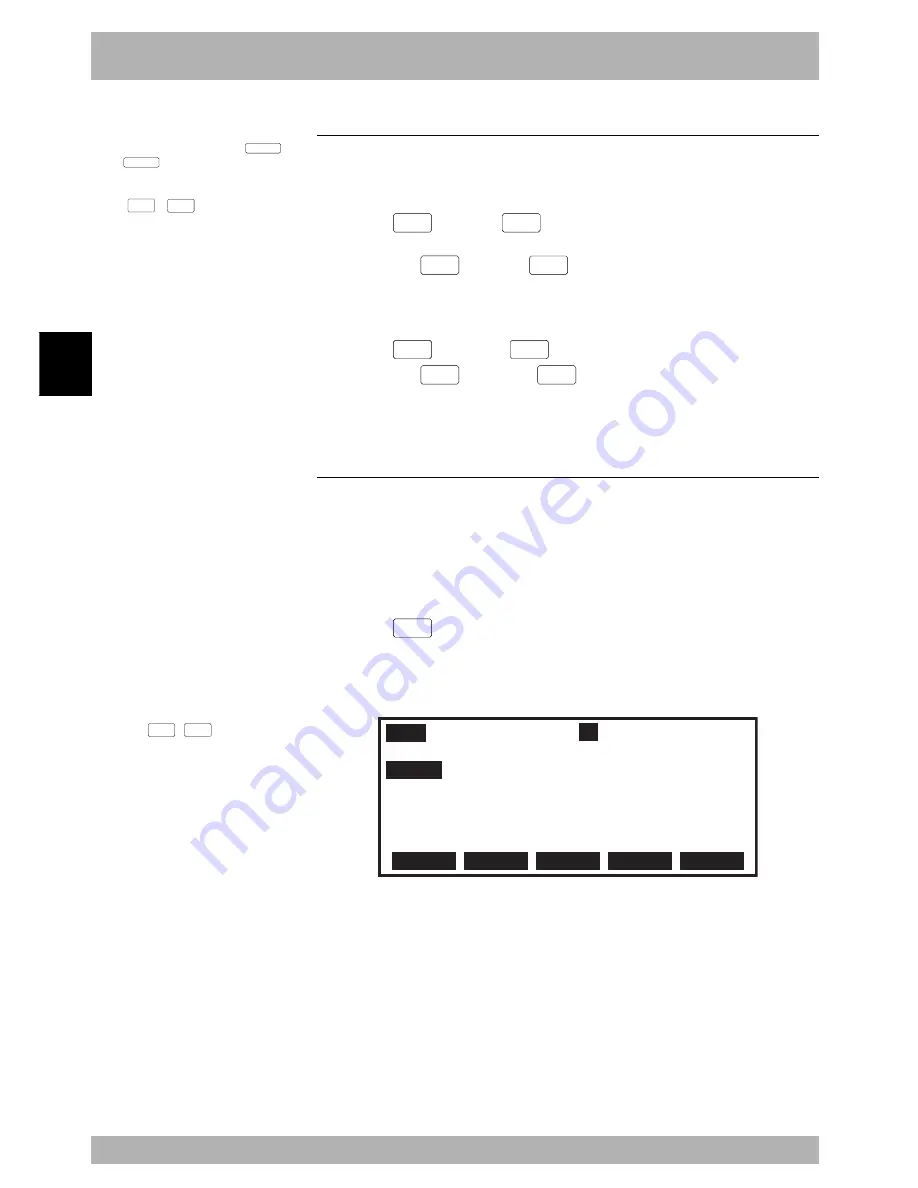
1) Press the
F 6
(POINT) key in “AUTO” mode.
The screen switches to “AUTO>POINT” mode and the point data appears as shown
below.
Fig. 4-9-12 Point trace screen (with no auxiliary axis)
AUTO
POINT [RIGHTY]
50
/100% [MG][S0H0J]
————————————x———————y———————z———————r———
P3 =
150.50 64.53 21.78 -45.14
P4 = 96.65 -224.89 43.31 28.79
P5 = -63432 19735 6243 22642
COMNT :
[LEFTY]
[POS] 0 0 0 0
PTP
JUMP
VEL+
VEL-
>
* The “[RIGHTY]” message on the first line appears only when a SCARA robot is
selected.
* The “[LEFTY]” message on the sixth line appears only when a SCARA robot is
selected, and a hand system flag is set for the point data.
n
NOTE
When two robots are specified, two
speeds are displayed for “
main group
/
sub group
”. The speed shown
highlighted can be set. To switch the
robot group, use the ROBOT key
(
LOWER
+
MODE
).
n
NOTE
• When two robots are specified,
check the currently selected robot
group on the MPB screen.
“[MG]” indicates the main robot
group and “[SG]” the sub robot
group. To switch the robot group,
use the ROBOT key
(
LOWER
+
MODE
).
• Point trace cannot be performed
unless return-to-origin is
complete.
n
NOTE
Automatic movement speeds once set
here are stored in the internal memory
even when the power is turned off.
If the speed is set with the program
command statement (SPEED
statement), the actual robot operating
speed will be the product of that speed
and the automatic movement speed.
For example, if the automatic
movement speed is 80% and the speed
specified by the SPEED statement is
50%, then the robot movement speed is
set as follows.
Operating speed = 80%
×
50% = 40%
Summary of Contents for RCX40
Page 1: ...User s Manual ENGLISH E YAMAHA 4 AXIS ROBOT CONTROLLER E75 Ver 12 00 RCX40 ...
Page 2: ......
Page 16: ...viii MEMO ...
Page 18: ...MEMO ...
Page 24: ...1 6 MEMO ...
Page 26: ...MEMO ...
Page 34: ...MEMO ...
Page 284: ...MEMO ...
Page 308: ...5 24 MEMO ...
Page 310: ...MEMO ...
Page 318: ...6 8 MEMO ...
Page 320: ...MEMO ...
Page 328: ...7 8 MEMO ...
Page 330: ...MEMO ...
Page 336: ...MEMO ...